RoboSub
Before Competition
About
Every year, teams from around the world gather at the international RoboSub competition to push the limits of autonomous underwater robotics. Since 1998, RoboSub has challenged student engineering teams to design fully autonomous submarines capable of completing complex underwater missions without human intervention. More than 50 teams, ranging from high school to university level, compete each year, including several Canadian universities. Over the years, S.O.N.I.A. has established itself as one of the most recognized and accomplished teams in the competition’s history, combining innovation, technical excellence, and more than 25 years of expertise in autonomous underwater vehicles.
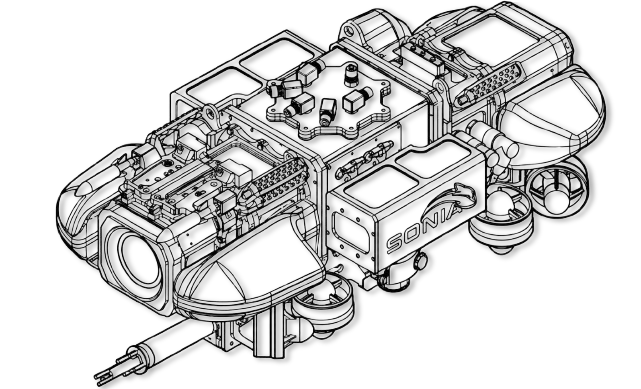

S.O.N.I.A. currently operates two autonomous underwater vehicles: AUV8.1 and LITE. Designed to work collaboratively during the competition, both submarines communicate and coordinate their actions underwater to accomplish complex missions efficiently. Equipped with advanced sensors and autonomous systems, the vehicles are capable of navigating, detecting objects, and interacting with their environment autonomously. While AUV8.1 handles the more complex tasks, LITE focuses on simpler objectives and data gathering to support the other vehicle during missions. Together, AUV8.1 and LITE showcase S.O.N.I.A.’s expertise in underwater robotics and autonomous cooperation.
Woollett Aquatics Center, Irvine
California, USA
May 27: Design Documentation Deadline
11-16 July 2025: Robosub Competition OnSite
Team presentation video
Competition Team Results
- 2025 – 19th position
- MathWorks Simulation Challenge – 1st place
- Design Documentation – Video : 3rd position
- Design Documentation – Assessment : 8th position
- Design Documentation – TDR : 9th position
- 2024 – 10th position
- Special Award : Best in style
- Design Documentation – Assessment : 3rd position
- Design Documentation – Video : 6th position
- Design Documentation – TDR : 7th position
- 2023 – 13th position
- Design Documentation – TDR : 4th position
- Design Documentation – Assessment : 5th position
- Design Documentation – Website : 7th position
- 2022 – 5th position
- Design Documentation: 2nd position
- Data sharing acknowledgement (Thanks Camille Sauvain!)
- Intervehicle Communication
- 2021 ***online competition
- Skills Video – Hull Design: 1st position
- Skills Video – Sensor Optimization: 2nd position
- Website: 9th position
- Technical Design Report: 13th position
Previous years
- 2020 – 20th position ***online competition
- 2019 – 17th position
- 2018 – 3rd position
- 2017 – 8th position
- 2016 – N/A
- 2015 – 17th position
- 2014 – 3rd position
- 2013 – 18th position
- 2012 – 3rd position
- 2011 – 1st position
- 2010 – 4th position
- 2009 – 10th position
- 2008 – 3rd position
- 2007 – 3rd position
- 2006 – 3rd position
- 2005 – 2nd position
- 2004 – 3rd position
- 2003 – 2nd position
- 2002 – 7th position
- 2001 – 11th position
- 2000 – 11th position



")














")






")






























