RoboSub
Avant la compétition
À propos
Chaque année, des équipes du monde entier se réunissent lors de la compétition internationale RoboSub afin de repousser les limites de la robotique sous-marine autonome. Depuis 1998, RoboSub met au défi des équipes étudiantes de concevoir des sous-marins entièrement autonomes capables d’accomplir des missions sous-marines complexes sans intervention humaine. Plus de 50 équipes, issues de niveaux allant du secondaire à l’université, participent chaque année, dont plusieurs universités canadiennes. Au fil des années, S.O.N.I.A. s’est imposée comme l’une des équipes les plus reconnues et les plus performantes de la compétition, combinant innovation, excellence technique et plus de 25 ans d’expertise en véhicules sous-marins autonomes.
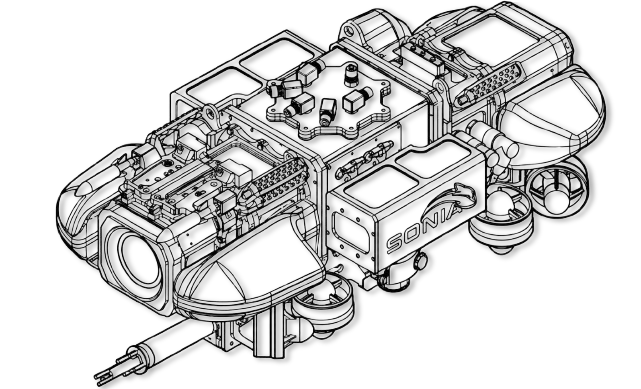

S.O.N.I.A. utilise actuellement deux véhicules sous-marins autonomes : AUV8.1 et LITE. Conçus pour travailler en collaboration lors des compétitions, les deux sous-marins communiquent et coordonnent leurs actions sous l’eau afin d’accomplir efficacement des missions complexes. Équipés de capteurs avancés et de systèmes autonomes, ils sont capables de naviguer, de détecter des objets et d’interagir avec leur environnement de manière autonome. Alors qu’AUV8.1 prend en charge les tâches les plus complexes, LITE se concentre sur des objectifs plus simples et sur la collecte de données afin de soutenir l’autre véhicule pendant les missions. Ensemble, AUV8.1 et LITE démontrent l’expertise de S.O.N.I.A. en robotique sous-marine et en coopération autonome.
Woollett Aquatics Center, Irvine
California, USA
27 mai : Remise limite des documents de design
11 au 16 juillet : Compétition Robosub sur le site
Vidéo de présentation de l'équipe
Résultats d'équipe de la compétition
- 2025 – 19e place
- MathWorks Simulation Challenge – 1ère place
- Documentation de conception - Vidéo: 3e place
- Documentation de conception - Évaluations : 8e place
- Documentation de conception - TDR : 9e place
- 2024 – 10e place
- Prix spécial : Best in style
- Documentation de conception - Évaluations : 3e place
- Documentation de conception - Vidéo: 6e place
- Documentation de conception - TDR : 7e place
- 2023 - 13e place
- Documentation de conception - TDR : 4e place
- Documentation de conception - Évaluations : 5e place
- Documentation de conception - Site Web : 7e place
- 2022 – 5e place
- Rapport technique: 2e place
- Data sharing acknowledgement (Merci Camille Sauvain!)
- Communication entre sous-marins
- 2021 ***competition en ligne
- Vidéo - Conception de la coque: 1ere place
- Vidéo - Optimisation des capteurs: 2e place
- Site web: 9e place
- Rapport technique: 13e place
Années précédentes
- 2020 – 20e place ***competition en ligne
- 2019 - 17e place
- 2018 – 3e place
- 2017 - 8e place
- 2016 - N.D.
- 2015 - 17e place
- 2014 - 3e place
- 2013 - 18e place
- 2012 - 3e place
- 2011 - 1ere place
- 2010 - 4e place
- 2009 - 10e place
- 2008 - 3e place
- 2007 - 3e place
- 2006 - 3e place
- 2005 - 2e place
- 2004 - 3e place
- 2003 - 2e place
- 2002 - 7e place
- 2001 - 11e place
- 2000 - 11e place



































")















")

")


