
Depuis 1999, S.O.N.I.A. a développé un total de 11 véhicules sous-marins autonomes, chaque nouvelle génération contribuant à l’évolution de nos conceptions, de nos systèmes et de notre expertise en robotique sous-marine.

Depuis 2019, l’équipe maintient et exploite deux sous-marins actifs pour les compétitions. Lors des missions, ils collaborent en partageant des informations et en se répartissant les tâches afin d’accomplir efficacement des opérations sous-marines complexes.

Découvrez nos sous-marins actifs
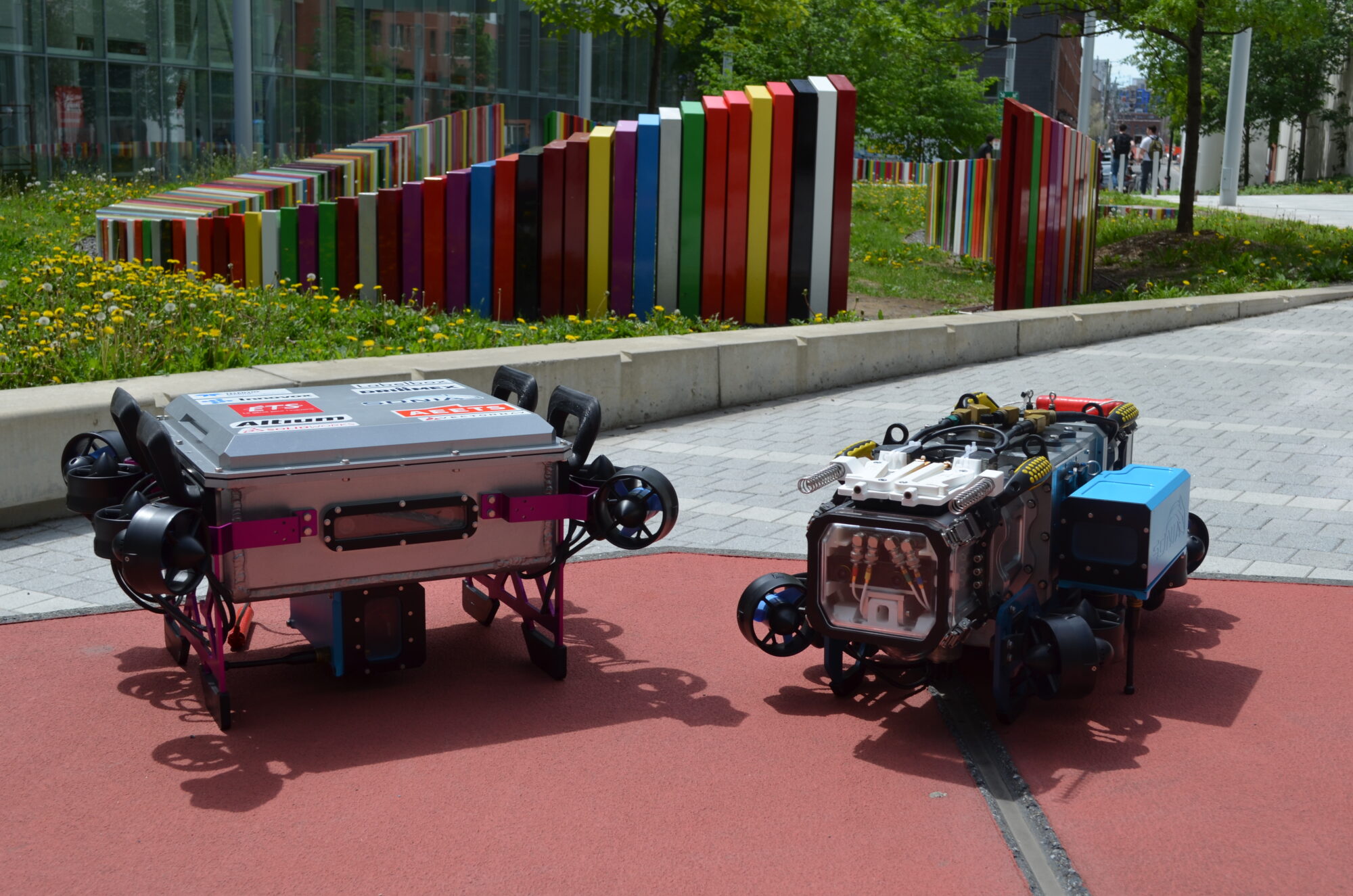
Actuellement, l’équipe utilise deux sous-marins actifs : AUV8.1 et LITE. Conçus pour travailler en collaboration lors des compétitions, ces deux véhicules communiquent et coordonnent leurs actions sous l’eau afin d’accomplir efficacement des missions complexes. Équipés de capteurs avancés et de systèmes autonomes, ils sont capables de naviguer, de détecter des objets et d’interagir avec leur environnement de manière entièrement autonome.
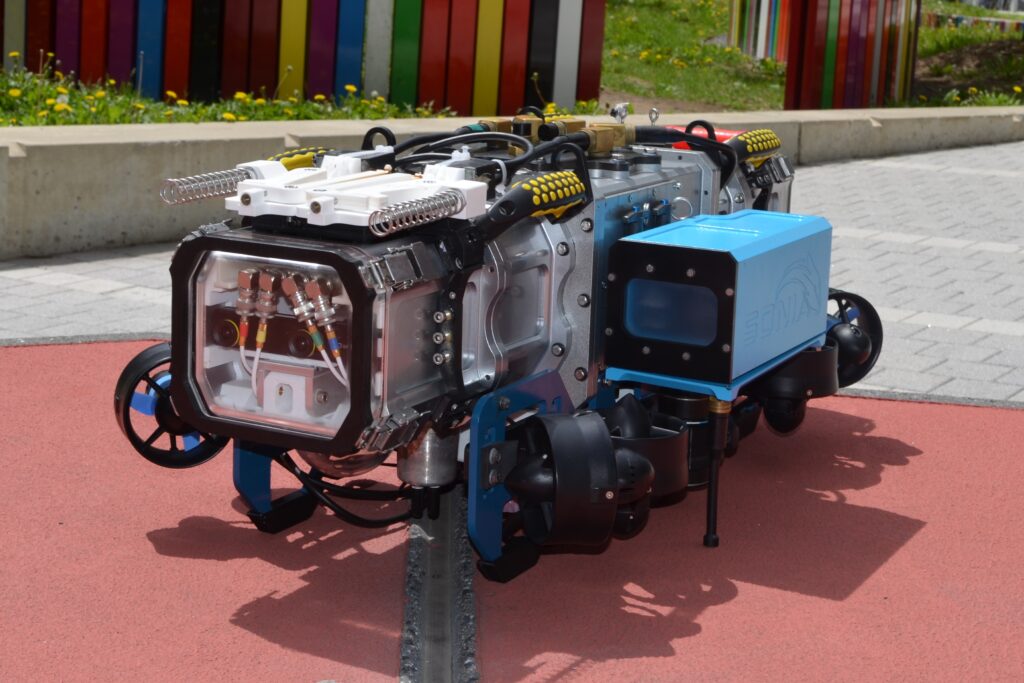
AUV8.1 agit comme le sous-marin principal. Équipé de l’ensemble des capteurs et actionneurs, il est responsable des tâches les plus complexes et de l’exécution des missions de haut niveau.

LITE complète AUV8.1 en se concentrant sur des objectifs plus simples et sur la collecte de données environnementales afin de soutenir le véhicule principal lors des missions.
AUVs précédents

AUV8 (2019-2024)
Pas vraiment à la retraite, il a évolué pour devenir AUV8.1

AUV7 (2017-2024)
Le sous-marin ayant la plus longue durée de service, avec 8 ans d’utilisation
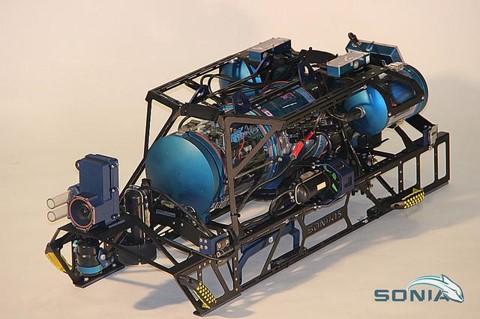
SONIA VIII – Kraken (2014-2016)
Dernier sous-marin de la série S.O.N.I.A., introduisant la convention de nommage « AUV » afin de correspondre à l’architecture logicielle

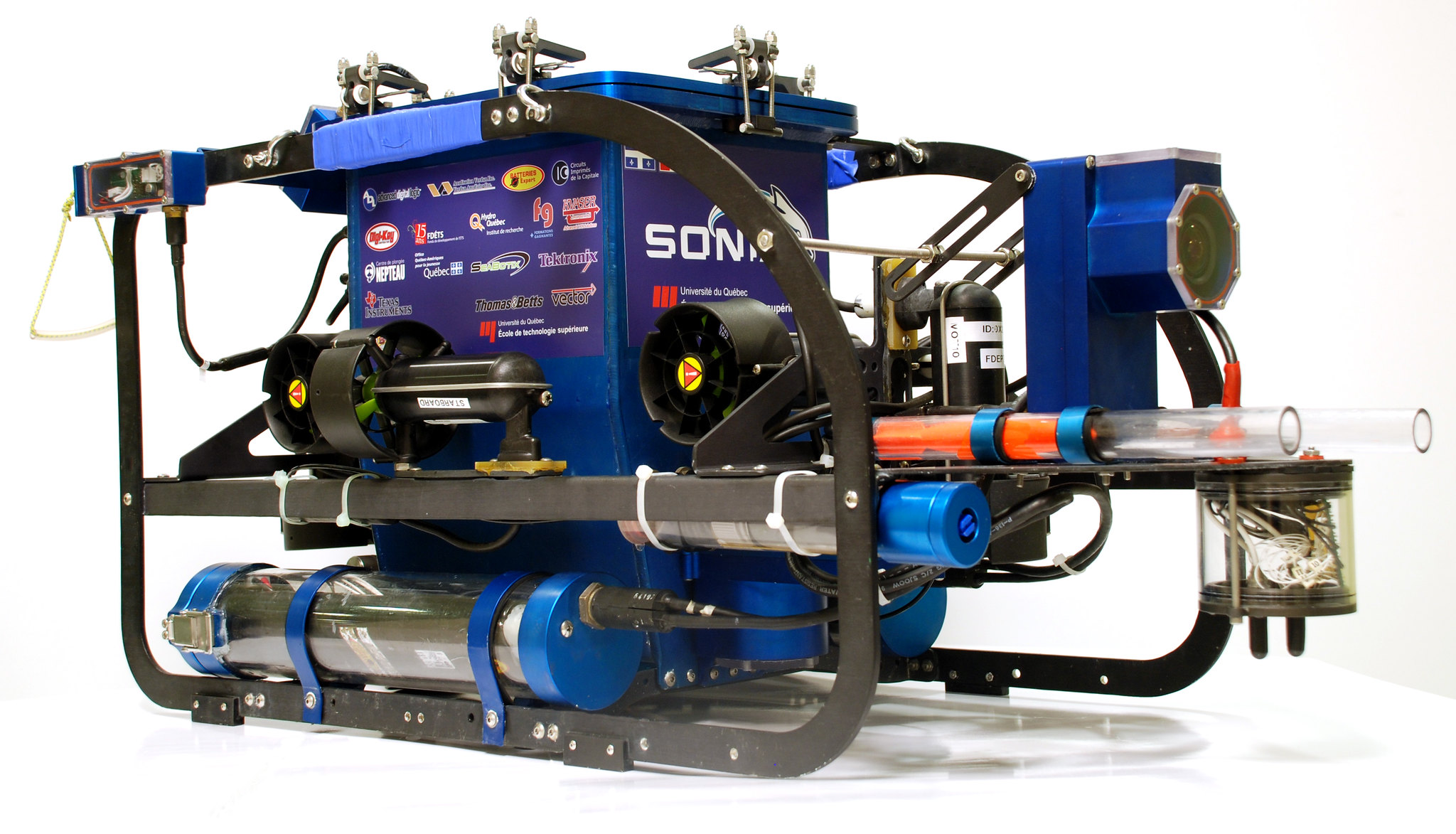
SONIA VII (2011-2013)
A remporté la première place à la compétition RoboSub en 2011 et à SAUC-E en 2012
SONIA VI (2009-2010)
Sa coque en métal lui permet d’opérer jusqu’à 10 mètres de profondeur sous la surface
SONIA V (2006-2008)
A participé à la première édition de RoboBoat en 2008 et a remporté la 3e place

SONIA IV (2004-2005)
A remporté la 3e puis la 2e place lors de ses deux participations à RoboSub

SONIA III (2002-2003)
Premier sous-marin de S.O.N.I.A. à atteindre le podium de RoboSub, avec une 2e place en 2003

SONIA II (2001)
À l’époque, le sous-marin était propulsé par deux moteurs montés sur un mécanisme rotatif commun

SONIA I (1999-2000)
Le premier sous-marin de S.O.N.I.A., fabriqué à partir d’un extincteur