
Since 1999, S.O.N.I.A. has developed a total of 11 autonomous underwater vehicles, with each new generation contributing to the advancement of our designs, systems, and expertise in underwater robotics.

Since 2019, the team has maintained and operated two active submarines for competitions. They function as a coordinated system during missions, sharing information and synchronizing their actions to efficiently complete complex underwater tasks.

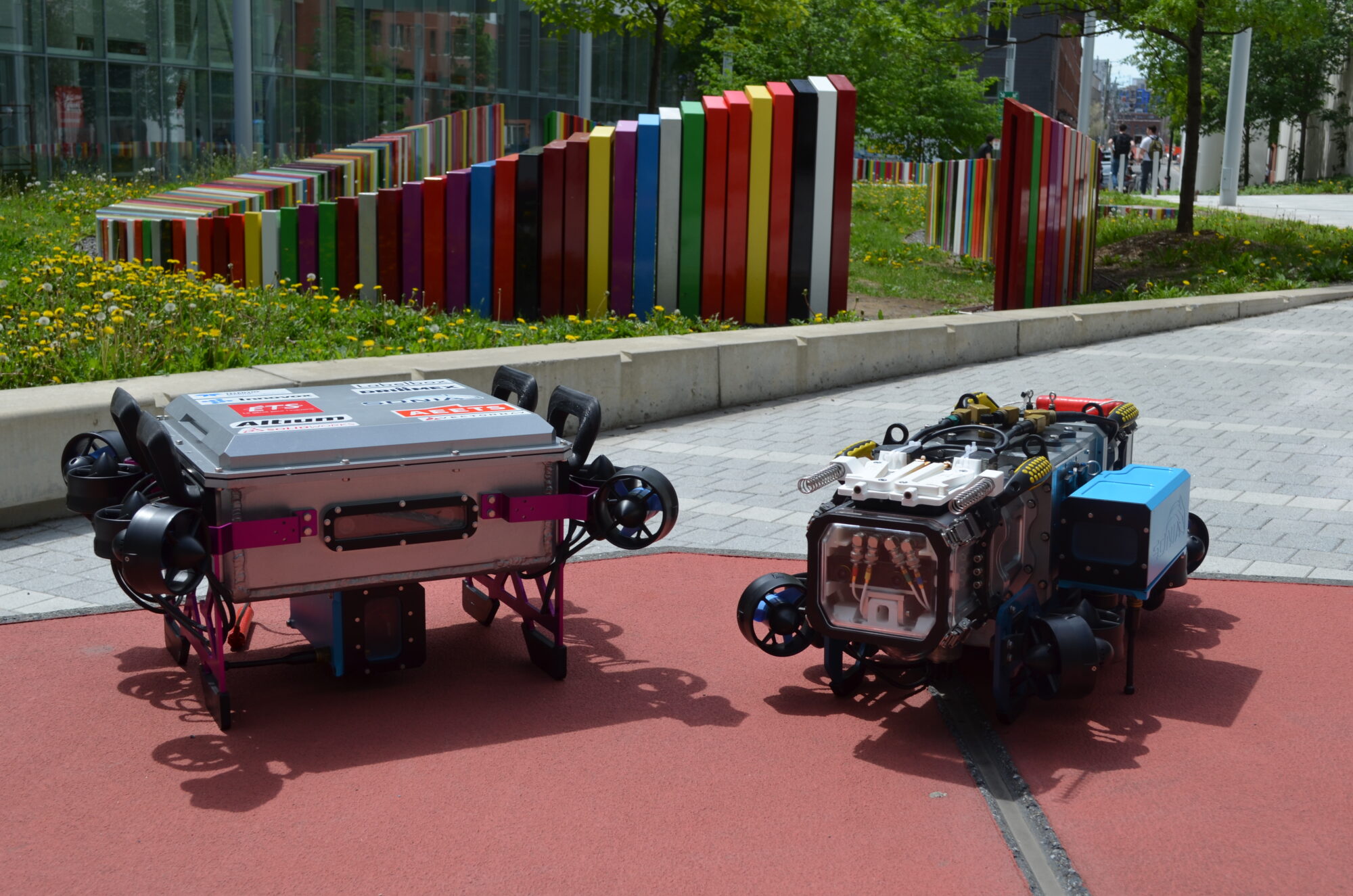
Meet our active submarines
Today, the team operates two active submarines: AUV8.1 and LITE. Designed to work collaboratively during competitions, both vehicles communicate and coordinate their actions underwater to accomplish complex missions efficiently. Equipped with advanced sensors and autonomous systems, they are capable of navigating, detecting objects, and interacting with their environment fully autonomously.
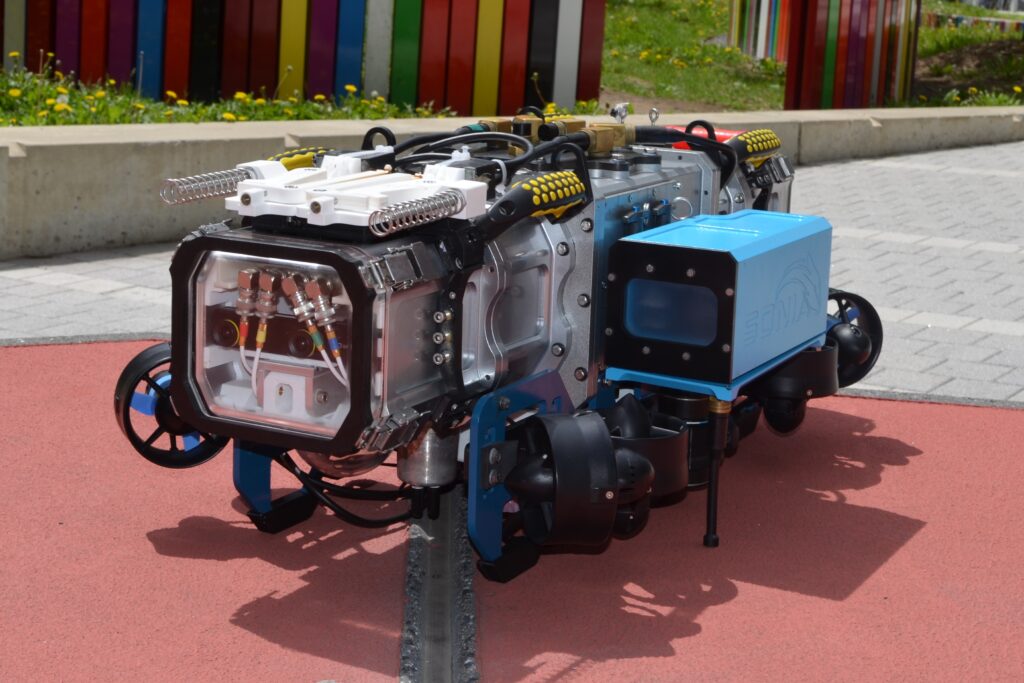
AUV8.1 act has the main submarine. Equipped with the full range of sensors and actuators, it is responsible for more complex tasks and high-level mission execution.

LITE complements AUV8.1 by focusing on simpler objectives and environmental data collection to support the main vehicle during operations.
Previous AUVs

AUV8 (2019-2024)
Not really retired, it evolved into AUV8.1

AUV7 (2017-2024)
The longest-operating submarine, with 8 years of service
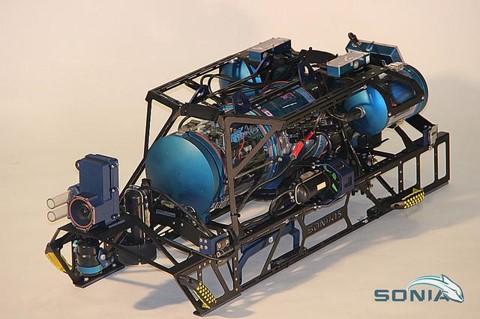
SONIA VIII – Kraken (2014-2016)
Last submarine of the S.O.N.I.A. series, introducing the “AUV” naming convention to match with the software architecture.

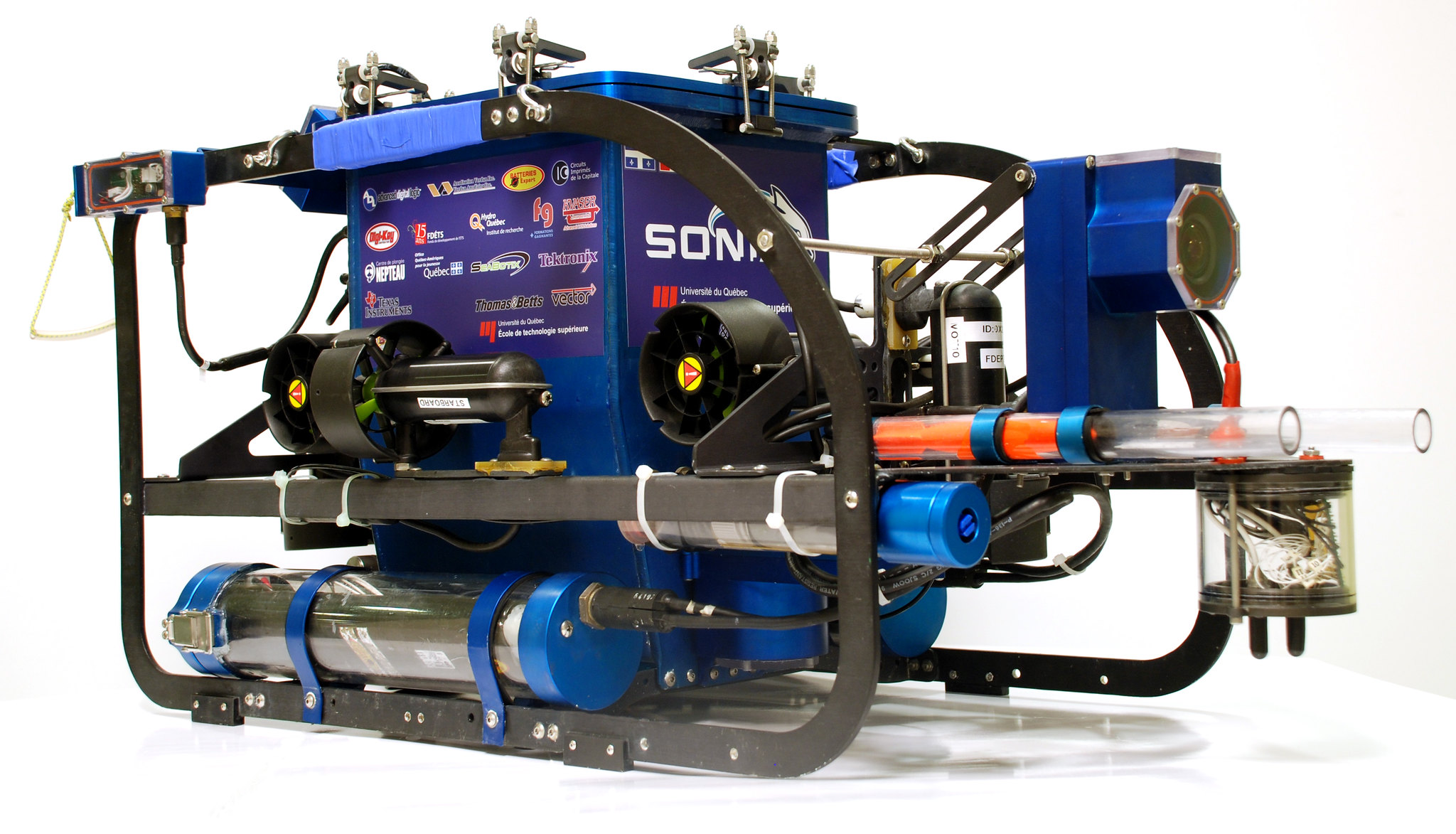
SONIA VII (2011-2013)
Won first place at the RoboSub competition in 2011
and at SAUC-E in 2012
SONIA VI (2009-2010)
Its metal hull allows it to operate at depths of up to 10 meters below the surface
SONIA V (2006-2008)
Participated at the first RoboBoat in 2008 and won 3rd place

SONIA IV (2004-2005)
Won 3rd and 2nd place during its two participations at RoboSub

SONIA III (2002-2003)
First S.O.N.I.A. submarine to reach the RoboSub podium with a 2nd place finish in 2003

SONIA II (2001)
At the time, the submarine was propelled using two motors mounted on a shared rotating mechanism

SONIA I (1999-2000)
S.O.N.I.A.’s first submarine, made from a fire extinguisher