
Meet the software team!
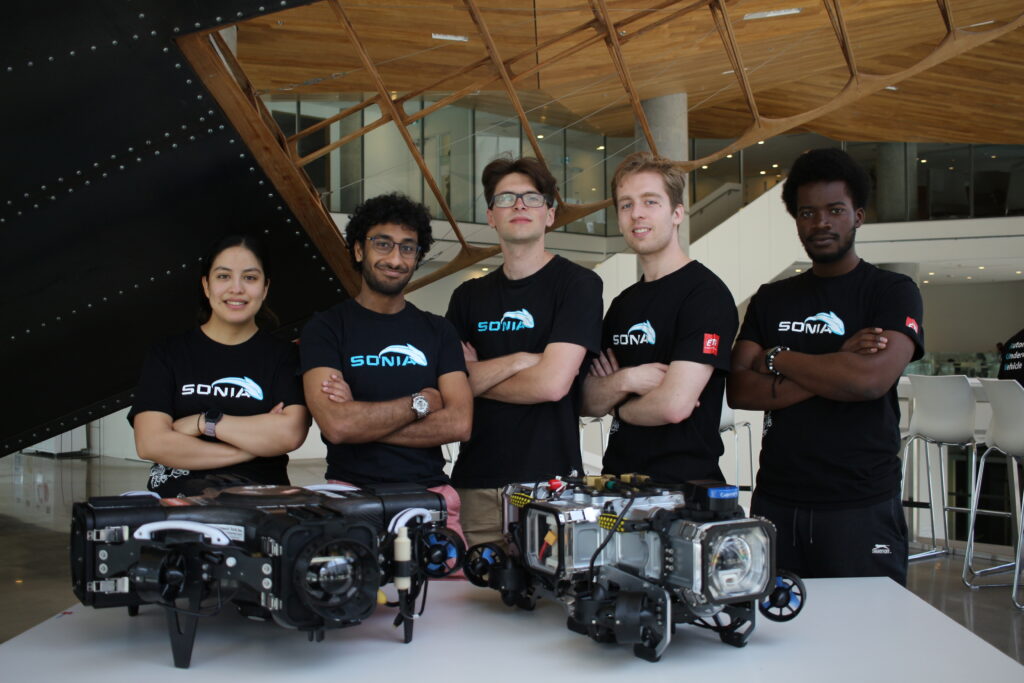
The software team is responsible for developing all computer-based systems onboard the AUVs. This includes everything from low-level drivers that collect data from sensors to the mission system that governs the submarine’s overall behaviour.
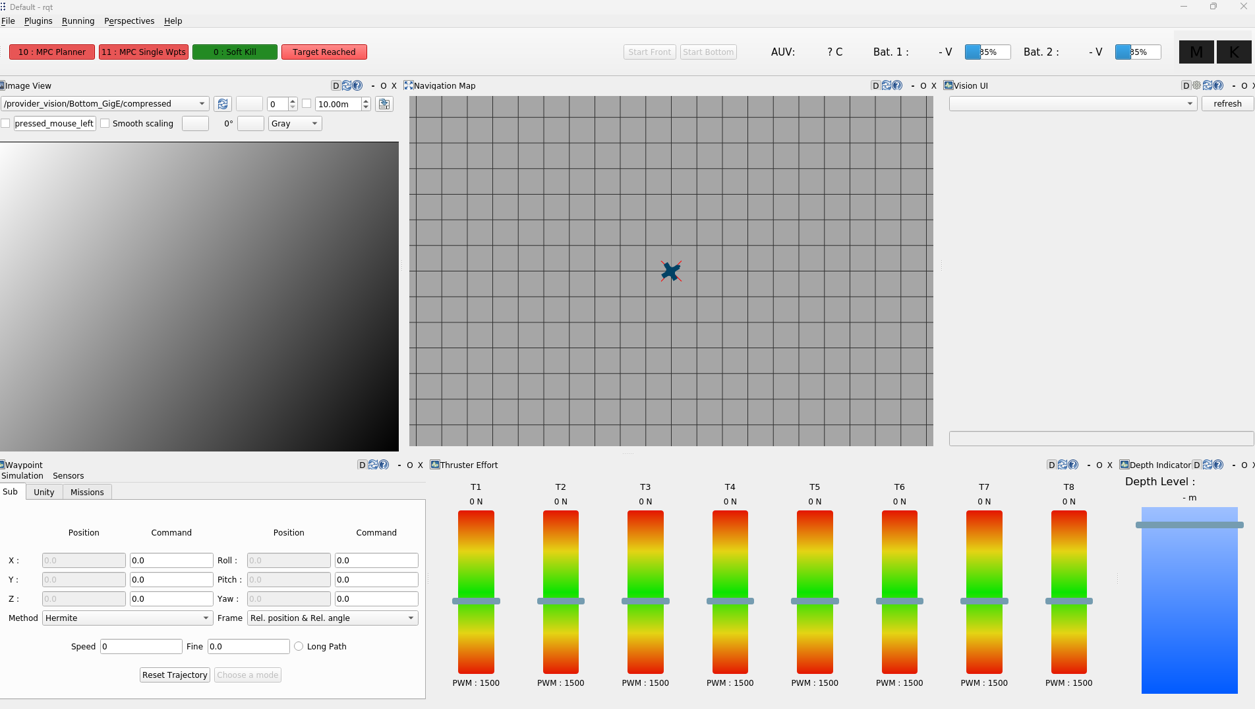
One of our key projects is an artificial intelligence system trained to recognize and classify objects around the submarines. The vehicle’s control is handled through a Model Predictive Control (MPC) approach, which uses real-time sensor data to estimate the vehicle’s position and compute its motion. Together, these systems are essential for ensuring smooth and reliable underwater navigation.
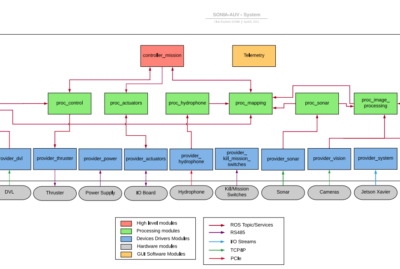
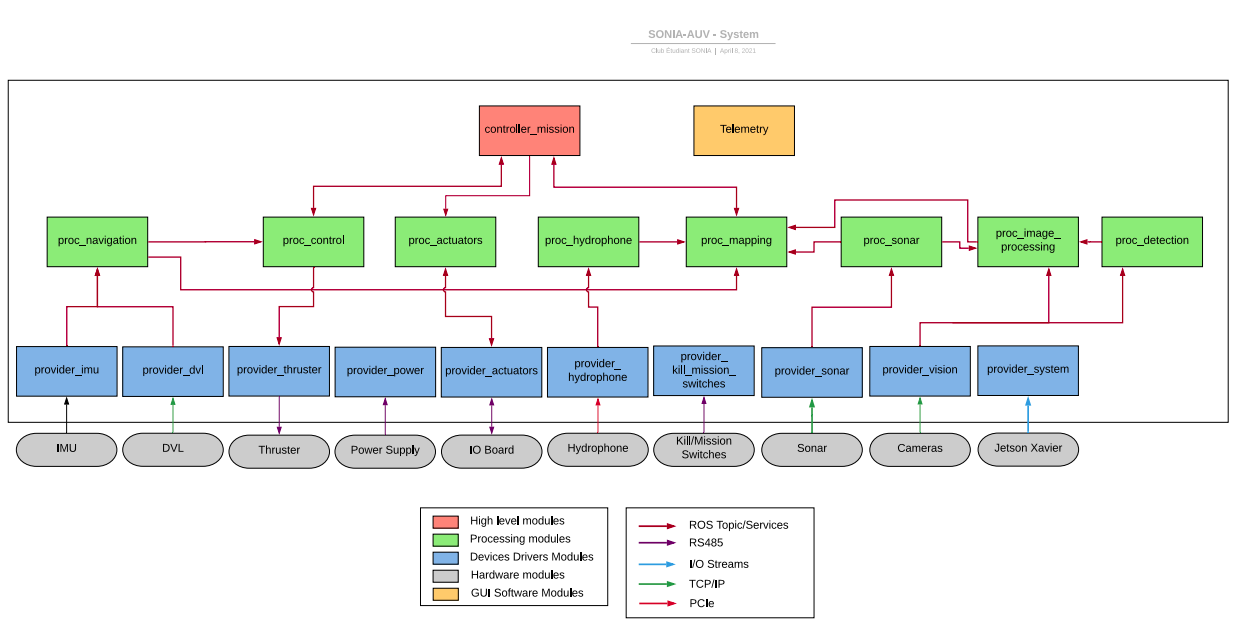
The software ecosystem is built around ROS 2, which acts as our communication framework. Its modular architecture allows each system to be developed independently while still integrating seamlessly into a single, cohesive system.
Software projects
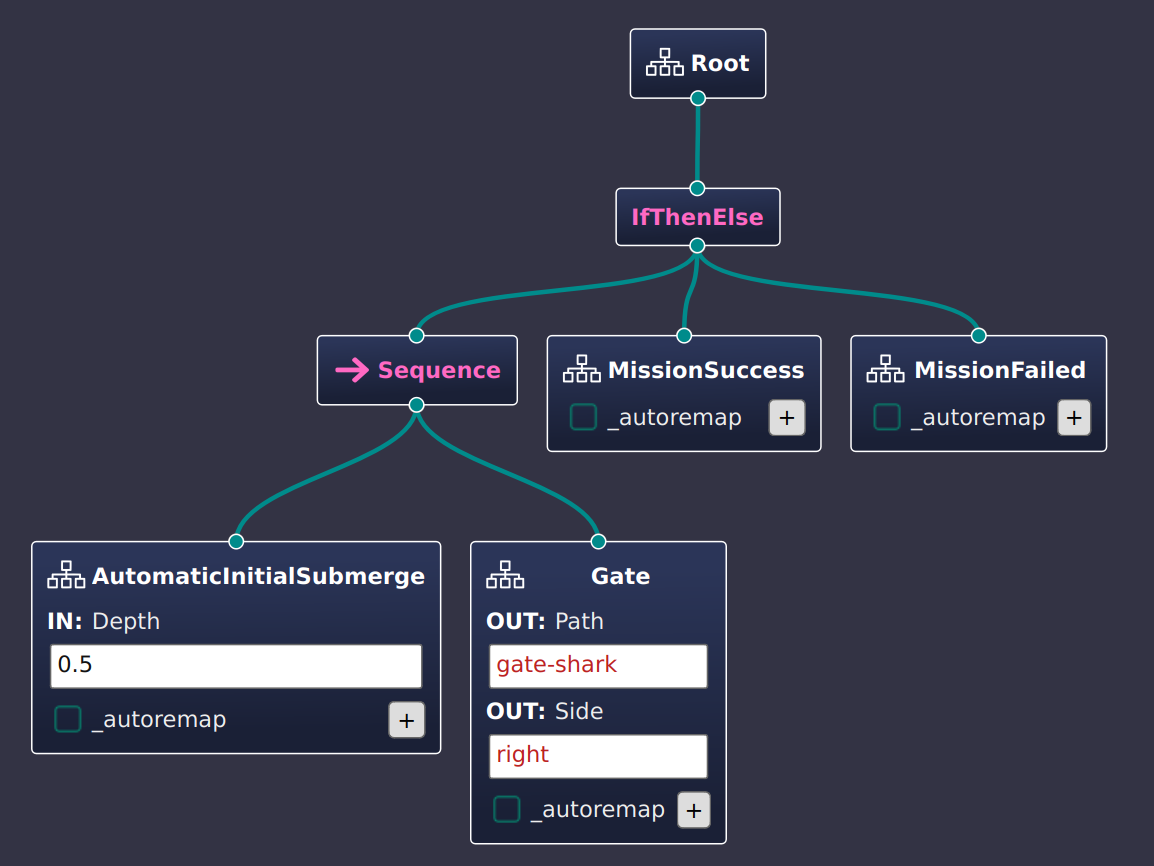
BehaviorTree (missions)
{kind=link}
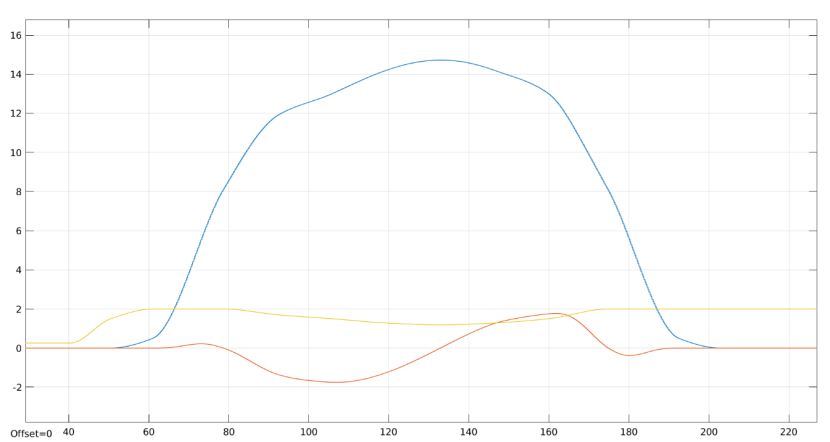
Control
{kind=link}
Providers and Procs
{kind=link}
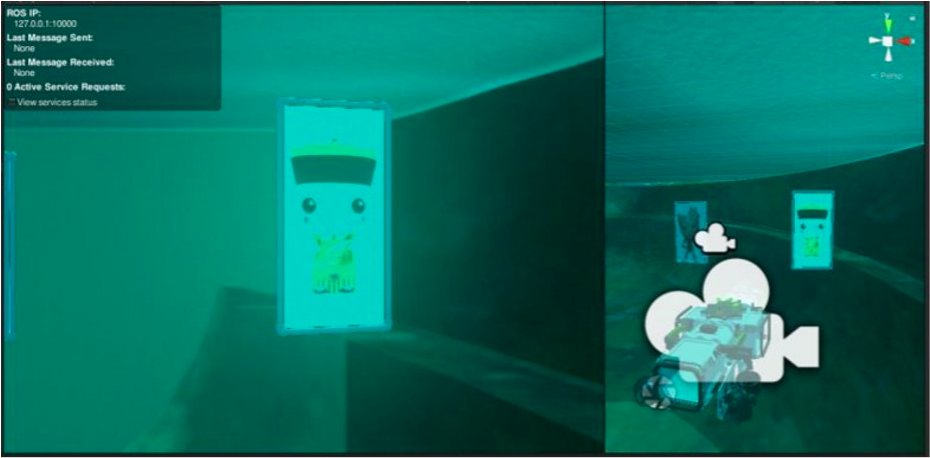
Simulation
Telemetry
