
Découvrez l’équipe électrique !

L’équipe électrique est responsable du développement, des tests et de l’intégration de la majorité des sous-systèmes électriques embarqués des sous-marins. Ces systèmes comprennent :
- La distribution d'énergie;
- L'interface de contrôle des moteurs;
- L'interface de la kill-switch et de la mission-switch;
- Le système de contrôle des actionneurs;
- Le système de communication inter-composants;
- Le système de communication inter-véhicules.
Un aspect important du travail de l’équipe est la conception de circuits imprimés (PCB) sur mesure pour les sous-marins. La plupart des sous-systèmes reposent sur des cartes électroniques dédiées pour fonctionner correctement, et l’équipe électrique prend en charge leur conception, leur assemblage et leurs tests afin de garantir un fonctionnement fiable dans des environnements sous-marins exigeants.
Projets électriques

{kind=link}
Entrées et Sorties
Des accessoires tels que les lance-torpilles, les bras robotiques et les largueurs de marqueurs sont intégrés aux sous-marins afin d’interagir avec l’environnement de compétition. Leur bon fonctionnement nécessite une intégration électrique et un contrôle fiables. L’équipe électrique joue un rôle clé dans la liaison entre les équipes logicielle et mécanique en connectant les systèmes de contrôle embarqués aux mécanismes physiques et aux actionneurs du véhicule.

{kind=link}
Communication inter-véhicules
La communication entre les sous-marins est assurée par deux techniques. La première repose sur la communication acoustique, où des microphones et des haut-parleurs sous-marins sont utilisés pour transmettre et recevoir des informations par le son. La seconde méthode utilise la communication optique, où des LED et des caméras sont employés pour encoder et décoder des données à l’aide de signaux lumineux. Grâce à l’un ou l’autre de ces systèmes, les sous-marins peuvent échanger des informations en temps réel pendant les opérations sans connexion physique, permettant des comportements coordonnés et améliorant l’efficacité des missions multi-véhicules.

{kind=link}
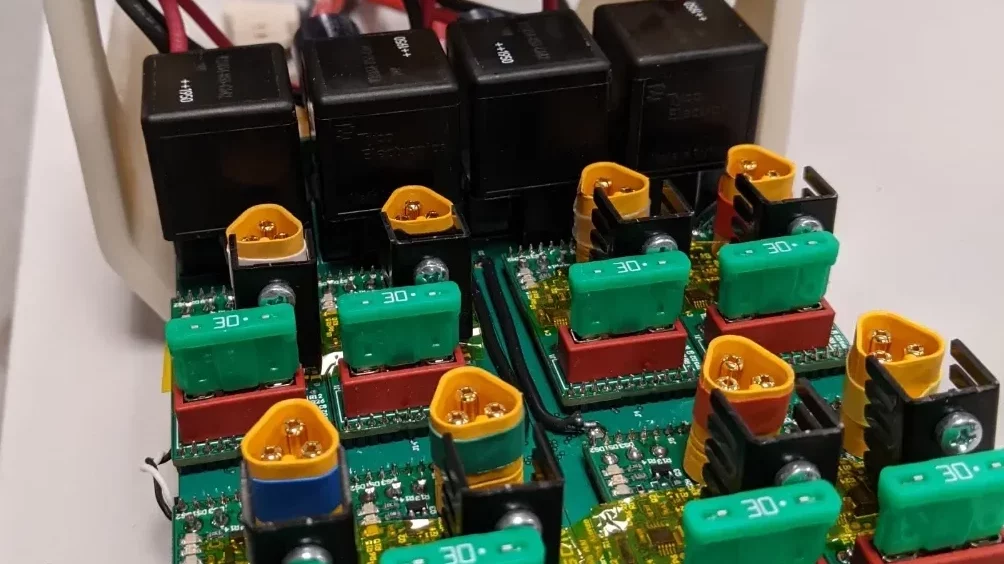
Alimentation
Les systèmes électroniques modernes nécessitent souvent une régulation précise de la tension pour fonctionner correctement. Dans les sous-marins de S.O.N.I.A., la tension provenant des batteries lithium-polymère est régulée et stabilisée avant d’être distribuée aux différents composants électroniques embarqués. Le système d’alimentation est également responsable de la gestion de la distribution de puissance vers les huit moteurs. De plus, il surveille en continu la tension, le courant et la température afin de garantir un fonctionnement sûr, et est capable de couper l’alimentation des moteurs en situation d’arrêt d’urgence.
{kind=link}
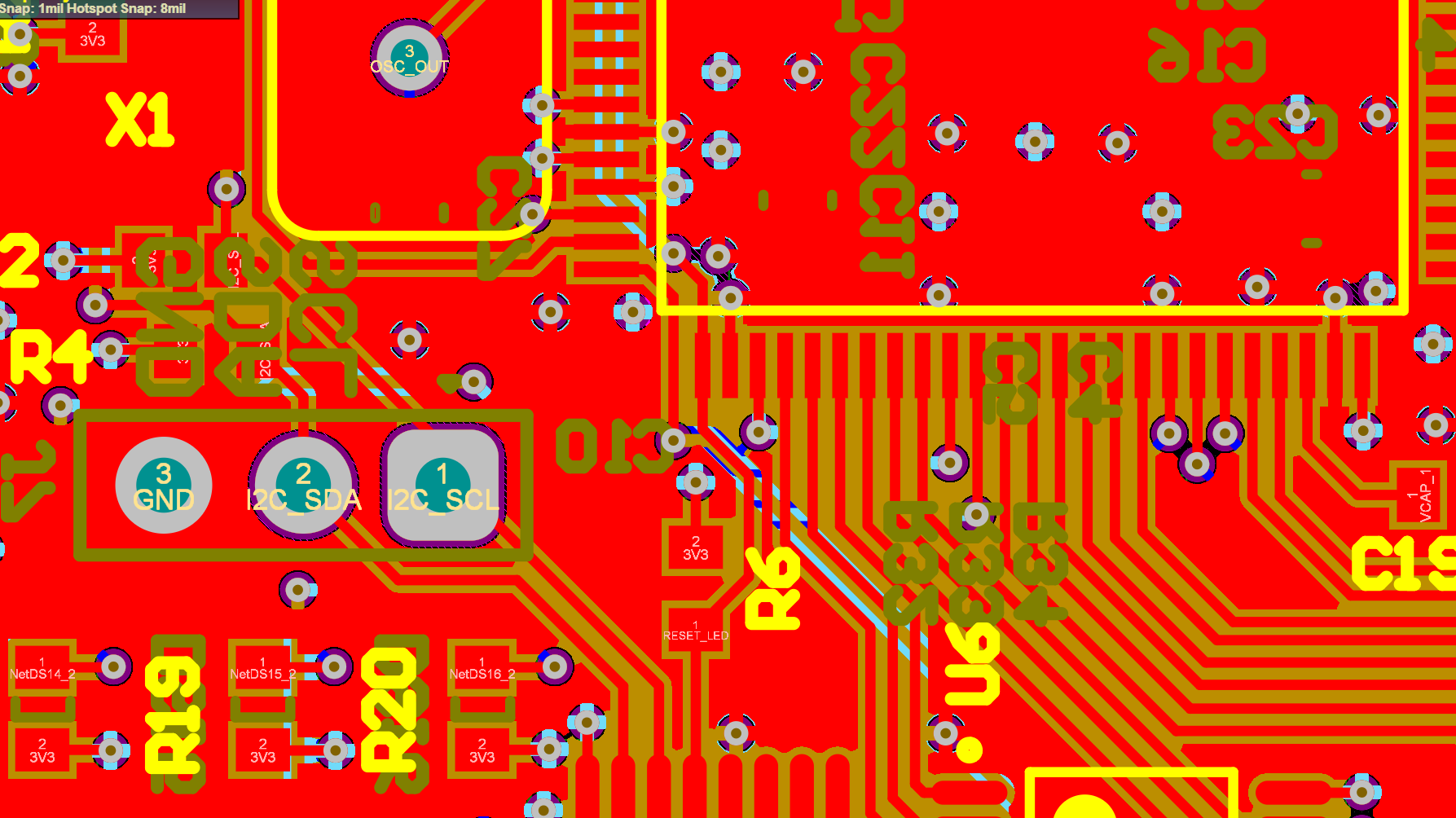
Conception de PCB
L’équipe électrique conçoit et développe des circuits imprimés (PCB) sur mesure pour les différents systèmes embarqués des sous-marins. Le processus de développement comprend la conception des schémas, le routage des PCB, la fabrication, le soudage, les tests et le débogage. Ces cartes sont conçues à l’aide d’Altium Designer afin de garantir une intégration électronique fiable et performante dans l’ensemble du véhicule.
{kind=link}
Systèmes embarqués
Tous les systèmes embarqués des sous-marins fonctionnent sous FreeRTOS sur des microcontrôleurs STM32F4. Le firmware de ces systèmes est entièrement développé, testé et maintenu par les membres de l’équipe électrique afin de garantir un fonctionnement temps réel fiable dans des conditions sous-marines difficiles.

{kind=link}
Hydrophones
En général, les hydrophones sont utilisés pour calculer le délail entre la réception d’un signal (« ping ») provenant d’une source de référence et sa détection par les trois autres hydrophones. À partir de ces différences de temps et de phase, le système peut estimer l’angle d’arrivée par rapport à l’axe X du sous-marin, ainsi que l’angle entre le plan X–Y et le pinger. Ces deux angles sont ensuite utilisés pour déterminer la position du véhicule et améliorer la précision de la navigation sous-marine. Bien que seul l’angle de cap soit strictement requis pour la compétition, l’utilisation des deux angles augmente la fiabilité du système et facilite la validation ainsi que la confirmation des mouvements du sous-marin dans l’eau.