
AUV8.1
La prochaine itération d'AUV8


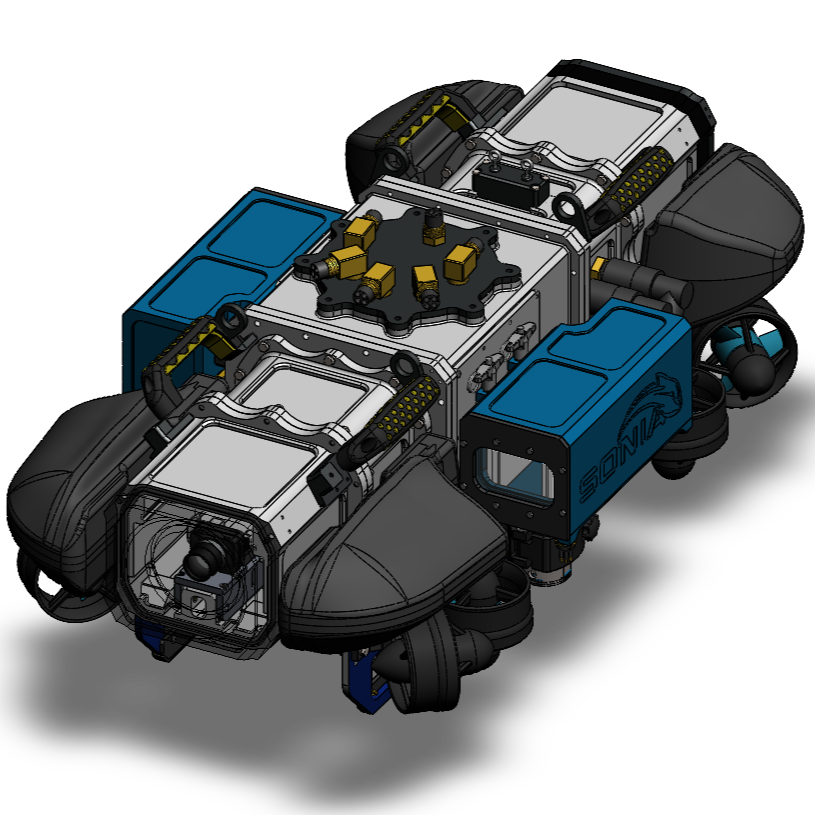
Objectif : Construit sur la plateforme originale AUV8, cette nouvelle itération a introduit d’importantes améliorations à sa conception modulaire en 2024. L’une des principales améliorations a été l’intégration de modules de batteries externes, supprimant ainsi le besoin d’ouvrir le sous-marin pour les changements de batteries. Cette modification réduit le risque de fuites affectant les composants critiques tout en diminuant considérablement le temps de maintenance et de préparation entre les missions. L’architecture hautement modulaire de l’AUV8 a rendu ces améliorations possibles tout en préservant la flexibilité pour les développements futurs.
Vue d'ensemble :

Dimensions
Longueur : 871 mm – Largeur : 453 mm – Hauteur : 319 mm – Poids : 42.9 kg – Volume : 0.0436 m3

Coque
Coque en aluminium usiné, conçue pour la résistance, la modularité et la fiabilité

6 degrés de liberté
X – Y – Z
Roll – Pitch – Yaw

Batteries
2 X LiPo 4S2P – 17000 mAh – 14.8-16.4V
Durée de fonctionnement : ≈ 1.25h

Moteurs
8 Blue Robotics T200 thrusters – Moteurs sous-marins brushless haute performance

Ordinateur
Jetson Xavier AGX (8-core NVIDIA 64-bit CPU +
512-core NVIDIA GPU + 32GB RAM)

Vision
Caméra stéréo compacte pour la perception de la profondeur, la cartographie 3D et le suivi visuel

IMU
VectorNav VN-100 – Unité de mesure inertielle (IMU) miniature haute performance

DVL
Teledyne Pathfinder – Doppler Velocity Log utilisé pour une navigation sous-marine précise

Logiciel
Ubuntu 20.04 – ROS 2 Humble – YOLOv11
C++ – Python
En savoir plus
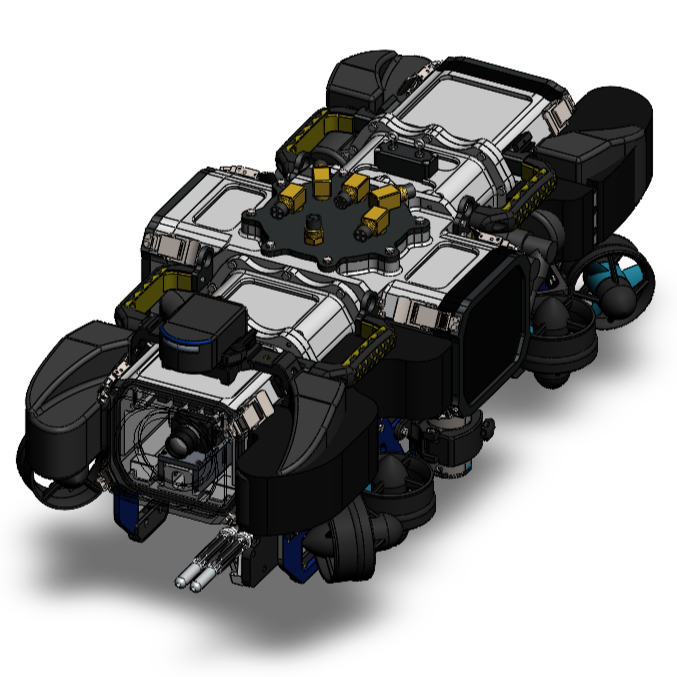
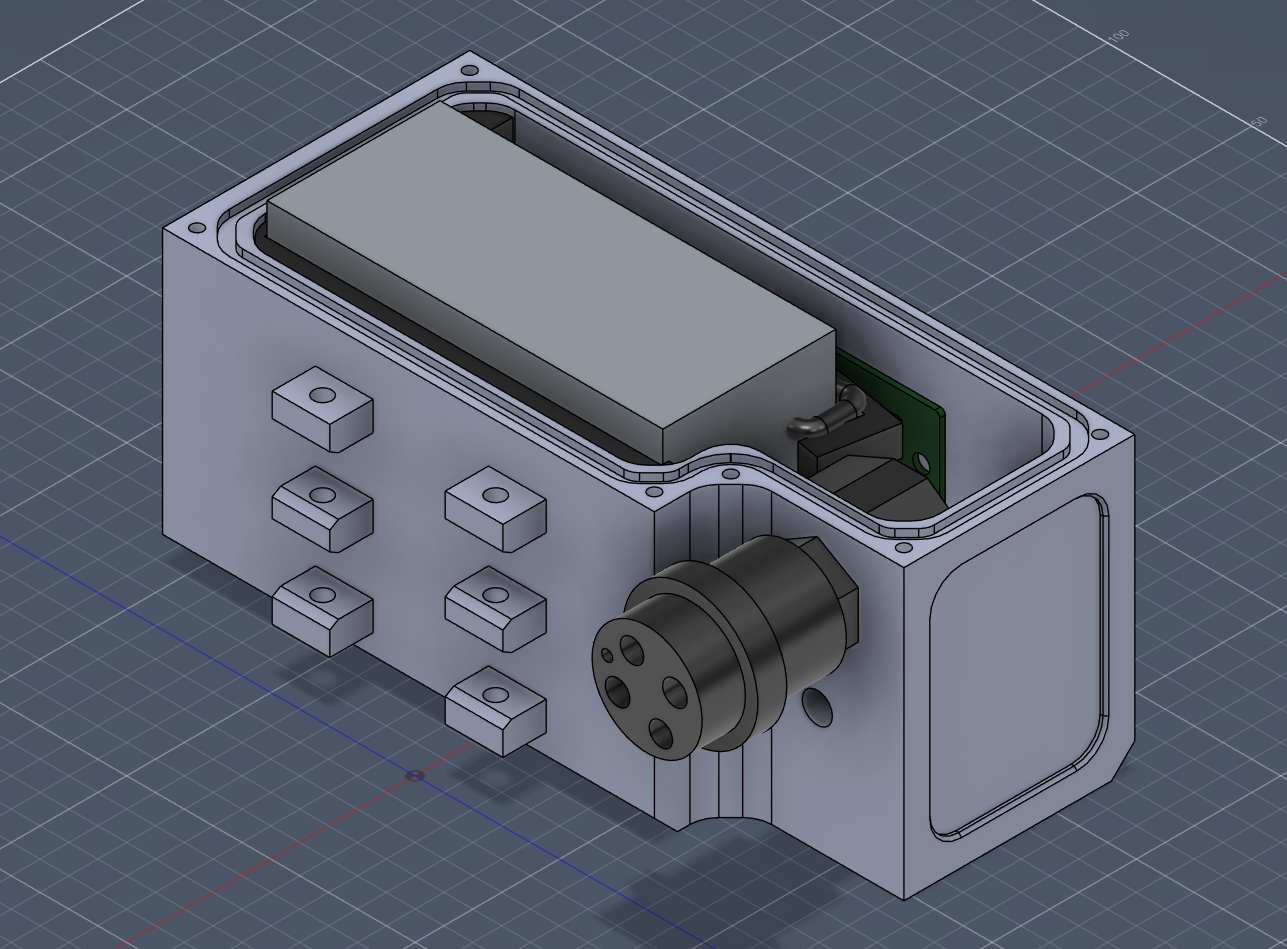
L’aspect mécanique du projet s’est concentré sur l’usinage et l’intégration d’une nouvelle section centrale ainsi que de boîtiers de batteries externes pour l’AUV8.1. La nouvelle section centrale fournit des points de montage pour les batteries, tout en augmentant le volume interne utilisable et en améliorant l’accessibilité aux composants électriques grâce à des panneaux d’accès sur le dessus et sur les côtés.
Les pieds de support, le système de flottaison et le point de montage du lanceur de torpilles ont également été redessinés, tandis que les autres composants structurels de l’AUV8 d’origine ont été conservés. La disposition des huit propulseurs a été maintenue similaire à la conception originale afin de préserver le système de contrôle à 6 degrés de liberté. Toutes les pièces en aluminium usinées ont un revêtement en poudre ou sont anodisées afin d’améliorer leur durabilité et d’augmenter leur résistance à la corrosion en milieu sous-marin.
Le système de support interne a été repensé afin de faciliter l’accès aux composants électriques tout en les maintenant solidement en place pendant le fonctionnement. Toutes les pièces sont imprimées en 3D et assemblées à l’intérieur du sous-marin à l’aide de clips, ce qui permet une installation plus rigide et sécurisée que la conception précédente. La disposition a été optimisée pour améliorer l’utilisation de l’espace, simplifier l’accès aux connexions électriques et améliorer le routage des câbles dans l’ensemble du véhicule. La circulation de l’air et la ventilation ont également été prises en compte dans la conception afin d’améliorer la circulation interne et la fiabilité globale du système.
Le système de gestion de batterie (BMS) est intégré à chaque boîtier de batterie et assure en continu la sécurité et le bon état des packs de batteries. Il surveille la tension, le courant et la température de chaque cellule afin d’optimiser les performances et de prolonger la durée de vie des batteries.
Le système permet également une recharge plus simple sans retirer les batteries de leurs boîtiers, ce qui réduit considérablement le temps de manipulation et minimise les risques de fuite ou d’infiltration d’eau.
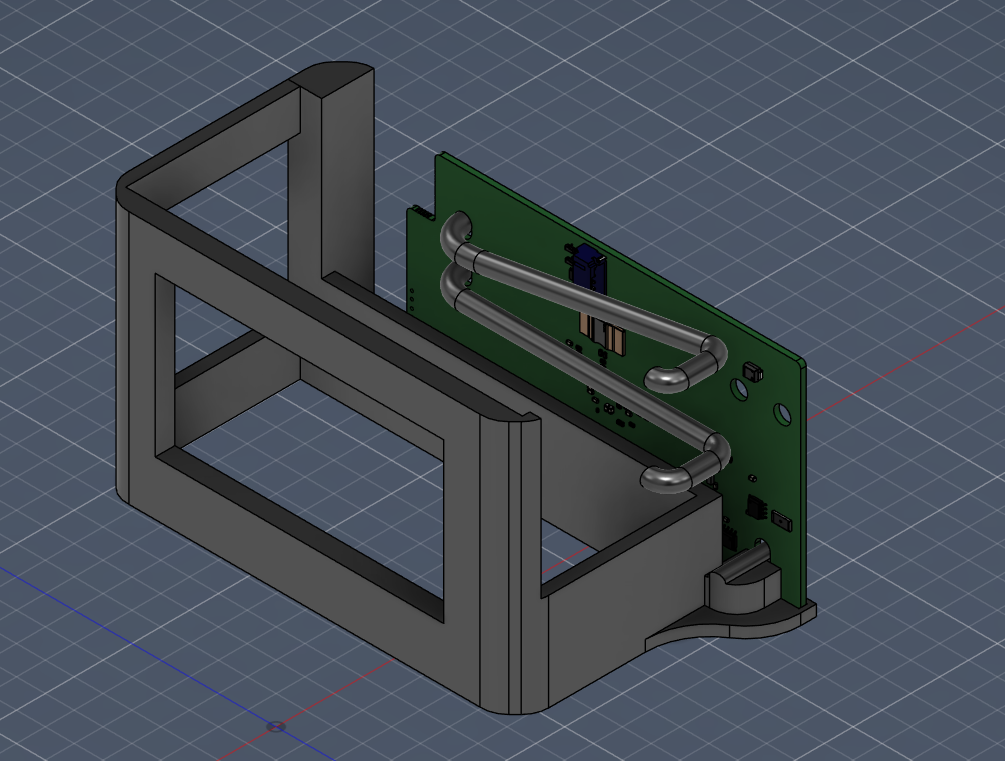
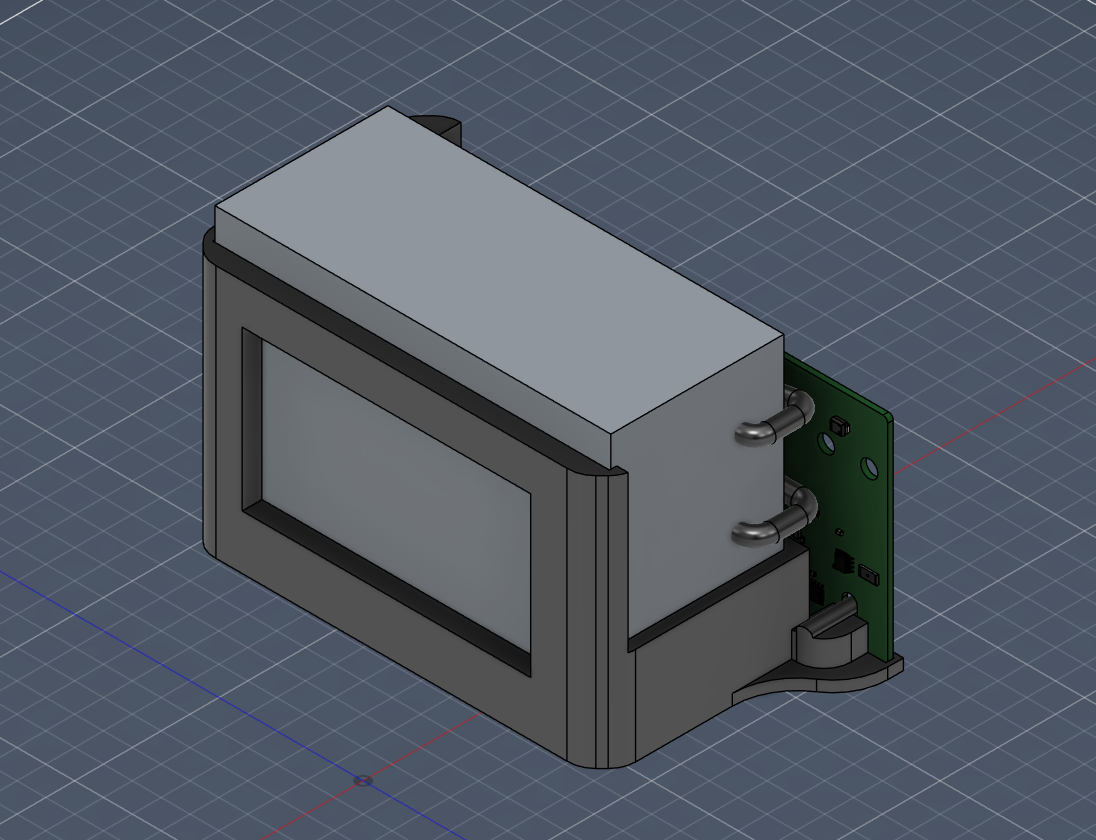

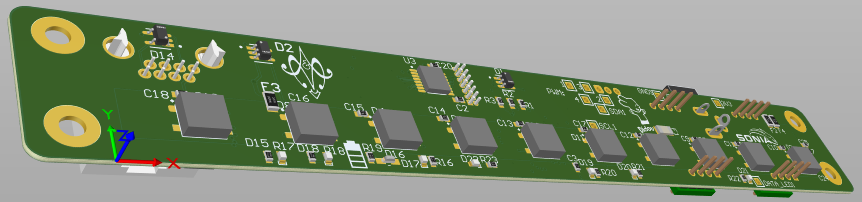
Le système de communication par LED a été intégré à l’avant des deux sous-marins afin de permettre la communication entre véhicules en contrôlant la couleur et les motifs lumineux. Lorsque les sous-marins ne communiquent pas entre eux, les LED sont utilisées pour transmettre en temps réel des informations d’état aux opérateurs au bord du bassin.
Ce nouveau système a nécessité le développement d’un circuit imprimé dédié, connecté au réseau RS485 du sous-marin, permettant de transmettre de manière fiable les commandes de l’ordinateur embarqué vers les LED adressables.
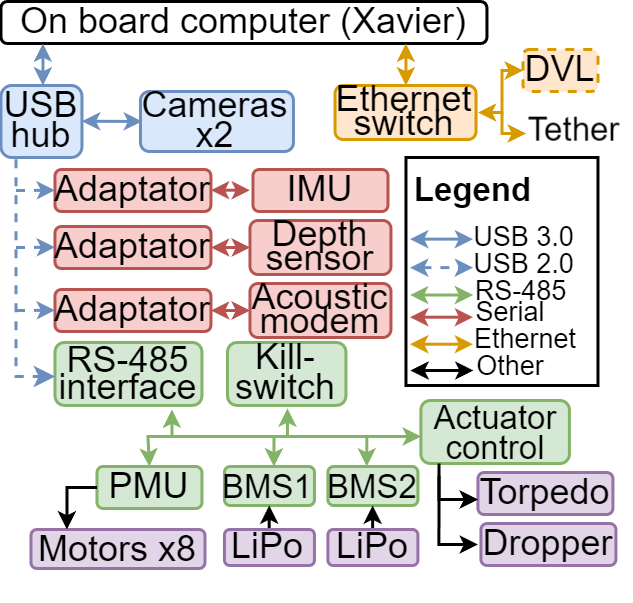
Ce diagramme présente l’architecture interne et le réseau de communication d’AUV8.1. Au centre du système se trouve l’ordinateur de bord, un Jetson AGX Xavier, qui gère l’autonomie du sous-marin, les capteurs et les systèmes de mission.
Le véhicule utilise plusieurs protocoles de communication pour connecter ses sous-systèmes. Les caméras communiquent directement via un hub USB, tandis que des convertisseurs série-USB sont utilisés pour l’IMU, le capteur de profondeur et le modem acoustique. Les systèmes électriques embarqués, tels que le PMU, les BMS et l’arrêt d’urgence, communiquent via un réseau RS-485 relié à l’ordinateur embarqué par une interface USB. Ces systèmes contrôlent ensuite le matériel du sous-marin ainsi que la distribution de l’énergie. Un commutateur Ethernet est également utilisé pour connecter le DVL et le cable de communication (tether) à l’ordinateur embarqué.
L’intégration de la caméra stéréoscopique ZED Mini permet aux sous-marins de disposer d’une perception en 3D et d’effectuer une cartographie en temps réel de l’environnement sous-marin. Les images capturées sont également envoyées au système d’intelligence artificielle embarqué dédié à la détection et à la reconnaissance d’obstacles, permettant ainsi la prise de décision autonome lors des missions.
La ZED Mini a été choisie pour ses capacités de perception de profondeur de haute qualité ainsi que pour son format compact, puisque la ZED 2i, plus volumineuse, ne pouvait pas rentrer dû aux contraintes de conception du sous-marin. La ZED Mini représente donc le meilleur compromis entre performance et faisabilité d’intégration.

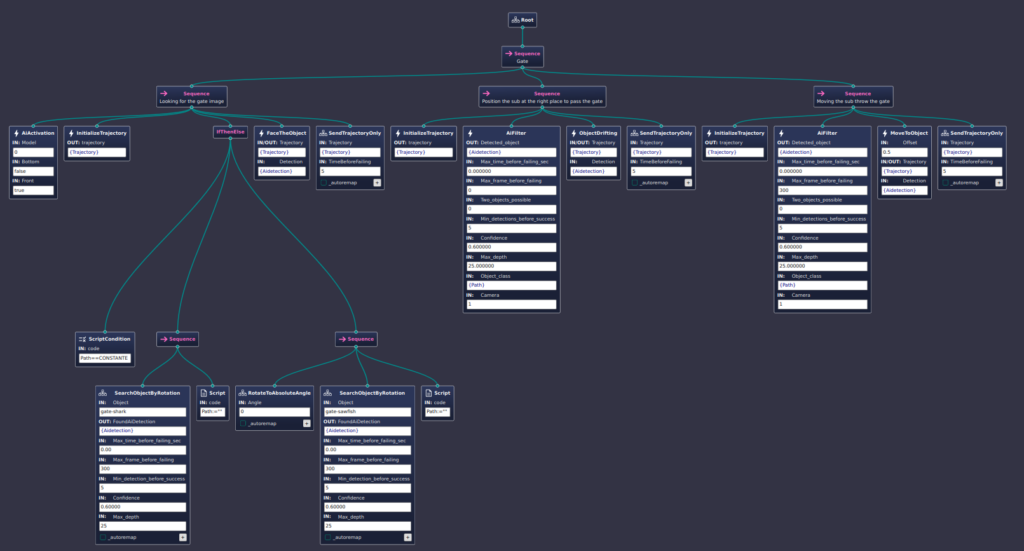
Le nouveau système de mission est basé sur BehaviorTree.CPP et Groot2 afin de contrôler le comportement de haut niveau du sous-marin. L’AUV8.1 est le premier véhicule de la flotte S.O.N.I.A. à adopter cette architecture.
Cette nouvelle approche offre une meilleure fiabilité et une plus grande flexibilité par rapport au système précédent. Sa structure modulaire facilite la personnalisation de la logique de mission, l’adaptation des comportements et l’intégration de nouvelles tâches autonomes, tout en maintenant un flux d’exécution clair et robuste.








