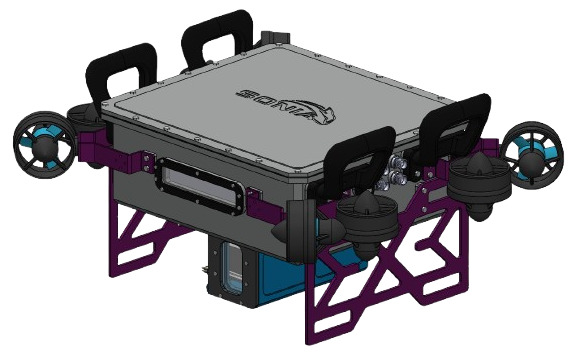

LITE a été conçu comme le premier véhicule de la nouvelle série LITE, avec pour objectif de fournir un sous-marin autonome secondaire capable d’assister l’AUV8.1 lors des missions. Son rôle principal est de gérer des tâches plus simples, de collecter des données environnementales et de mission, et de transmettre ces informations au véhicule principal. Afin d’obtenir une conception plus légère et plus compacte, LITE ne comprend pas de DVL, de lance-torpilles, de largueur de marqueurs ni de bras robotisé. Le véhicule fonctionne également avec une seule batterie, ce qui réduit encore le poids et simplifie son architecture tout en conservant des capacités autonomes efficaces.
Vue d'ensemble :

Dimensions
Longueur : 593 mm – Largeur : 661 mm – Hauteur : 349 mm – Poids : 28.26 kg – Volume : 0.0333 m3

Coque
Coque en aluminium usinée et soudée, garantissant une structure solide, légère et étanche.

6 degrés de liberté
X – Y – Z
Roll – Pitch – Yaw

Batterie
1 X LiPo 4S2P – 17000 mAh – 14.8-16.4V
Durée de fonctionnement : ≈ 45mn

Moteurs
8 Blue Robotics T200 thrusters – Moteurs sous-marins brushless haute performance

Ordinateur
Jetson Xavier AGX (8-core NVIDIA 64-bit CPU +
512-core NVIDIA GPU + 32GB RAM)

Vision
Caméra stéréo haute qualité pour la perception de la profondeur, la cartographie 3D et le suivi visuel

IMU
VectorNav VN-100 – Unité de mesure inertielle (IMU) miniature haute performance

Contrôle
Estimation d’état basée sur IMU et contrôle à 6 DDL à l’aide d’un filtre de Kalman étendu et d’un MPC.

Logiciel
Ubuntu 20.04 – ROS 2 Humble – YOLOv11
C++ – Python
En savoir plus
La coque du LITE a été usinée à partir de cinq sections en aluminium et soudée en une structure étanche avec l’aide de notre partenaire Paco Métal. Le fond et les quatre panneaux latéraux sont soudés de façon permanente, tandis que le couvercle supérieur est fixé par des boulons afin de permettre l’accès aux composants internes. Le positionnement des huit propulseurs suit la même configuration que nos autres sous-marins afin de préserver le système de contrôle à 6 degrés de liberté.
La batterie est montée sous le sous-marin, ce qui a conduit à la conception de pattes et de poignées spécialisées permettant de retourner le véhicule de manière sûre et facile lors des opérations de maintenance et de manipulation de la batterie. La coque est thermolaquée afin d’améliorer sa résistance à la corrosion, tandis que toutes les autres pièces usinées sont anodisées pour augmenter leur durabilité en milieu sous-marin.
Le système de support interne a été conçu comme un ensemble amovible permettant d’accéder et de travailler sur tous les composants électriques en dehors du sous-marin. Une fois les câbles déconnectés et les vis de fixation retirées, l’assemblage complet peut être extrait comme une seule unité pour faciliter les opérations de maintenance et d’intégration. Les poignées horizontales peuvent être rapidement retirées en retirant des goupilles de retenue, améliorant ainsi l’accessibilité lors des interventions à l’intérieur du véhicule.
La plupart des éléments structurels du rack sont imprimés en 3D afin de réduire le poids et de simplifier les modifications. Des vis en nylon sont également utilisées à l’intérieur du sous-marin afin de minimiser les risques de court-circuit en cas de desserrage d’un élément de fixation pendant le fonctionnement.
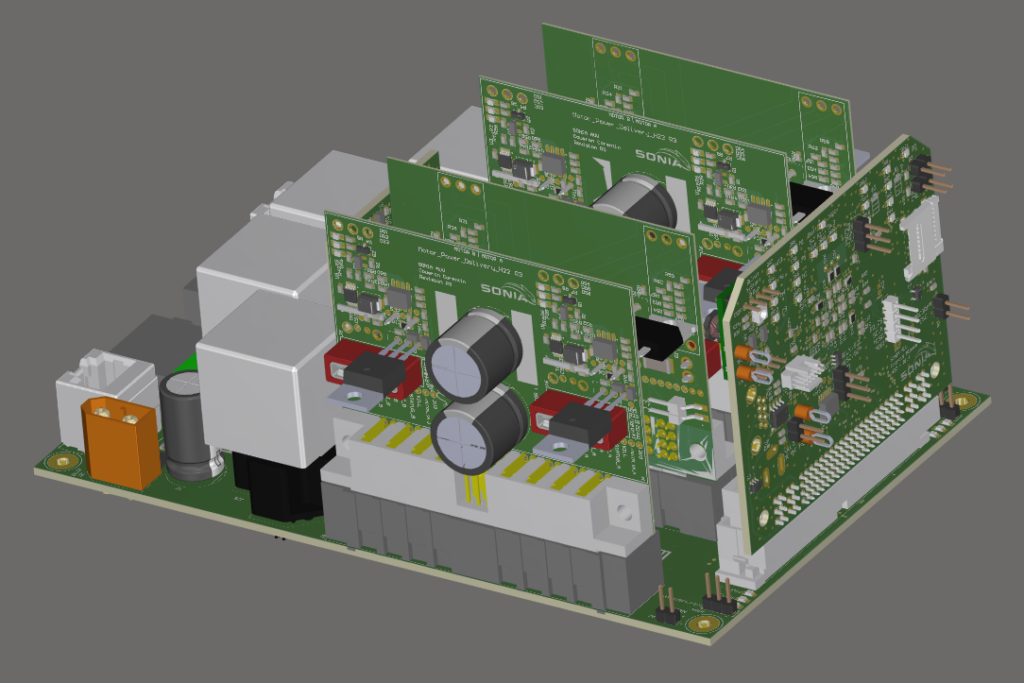

Le nouveau système de gestion de puissance (PMU) est connecté directement aux batteries et est responsable de la distribution de l’énergie vers l’ensemble des systèmes et composants embarqués. En plus de la gestion de l’alimentation, le PMU assure également des fonctions de sécurité critiques, notamment la coupure de l’alimentation des propulseurs lorsque l’arrêt d’urgence est activé.
Ce système de protection est implémenté sous forme d’un vrai « hard kill », ce qui signifie que l’arrêt ne dépend pas du logiciel ni de l’ordinateur embarqué. Lorsque l’arrêt d’urgence est déclenché, l’alimentation des moteurs est physiquement coupée, empêchant tout mouvement du sous-marin et garantissant une utilisation sûr lors de la manipulation ou en situation d’urgence.
Le PMU a été conçue avec une architecture modulaire afin de simplifier la maintenance et d’améliorer la fiabilité. Quatre cartes de contrôle identiques et interchangeables sont utilisées, chacune étant responsable de l’alimentation et du contrôle de deux propulseurs. En cas de défaillance, une carte peut être rapidement déconnectée et remplacée sans modifier le reste du système. Le circuit de sécurité est intégré au même système de connecteurs, ce qui simplifie encore l’installation et la maintenance tout en garantissant une conception électrique robuste et sécuritaire.
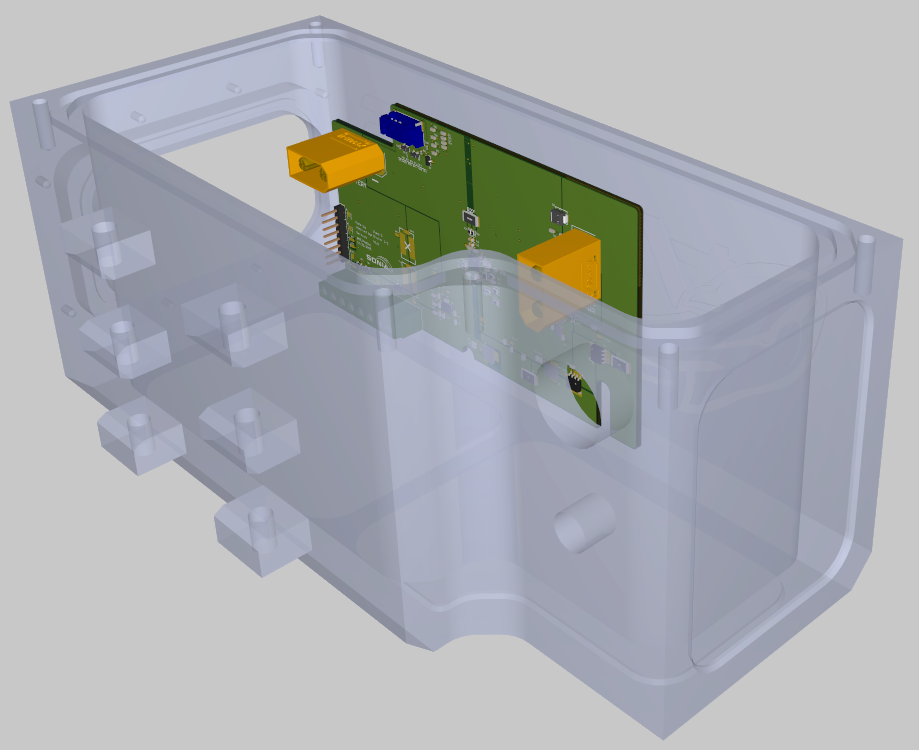
Le LITE intègre également la même architecture de système de gestion de batterie (BMS) que celle utilisée sur l’AUV8.1, assurant une surveillance et une protection continues du pack de batteries. Le système surveille la tension, le courant et la température de chaque cellule afin de garantir un fonctionnement sûr, d’optimiser les performances et de prolonger la durée de vie des batteries.
Puisque LITE fonctionne avec une seule batterie, la demande électrique sur le pack est plus élevée que sur l’AUV8.1. Le BMS joue donc un rôle encore plus important dans le maintien de l’intégrité de la batterie et dans la garantie d’un fonctionnement fiable pendant les missions. Comme pour l’AUV8.1, le système permet également de charger la batterie directement dans son boîtier, ce qui réduit le temps de manipulation et minimise les risques de fuite ou d’infiltration d’eau.
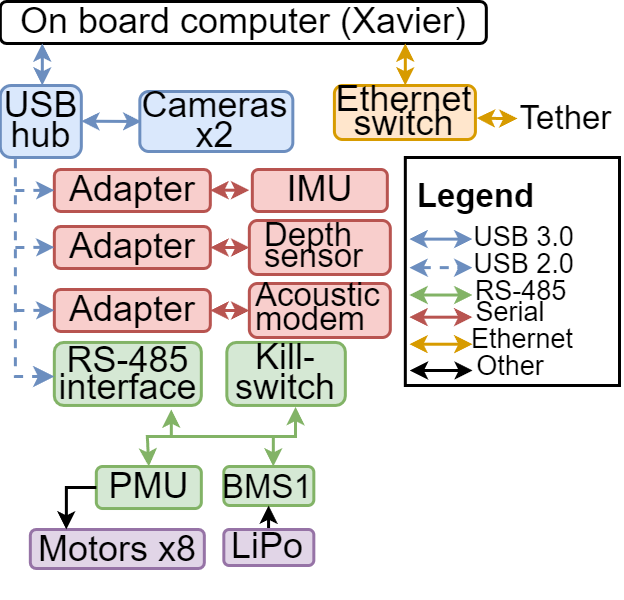
Ce diagramme présente l’architecture interne et le réseau de communication du LITE. Au centre du système se trouve l’ordinateur de bord, un Jetson AGX Xavier, qui gère l’autonomie du sous-marin, les capteurs et les systèmes de mission.
Le véhicule utilise plusieurs protocoles de communication pour connecter ses sous-systèmes. Les caméras communiquent directement via un hub USB, tandis que des convertisseurs série-USB sont utilisés pour l’IMU, le capteur de profondeur et le modem acoustique. Les systèmes électriques embarqués, tels que le PMU, un BMS unique et l’arrêt d’urgence, communiquent via un réseau RS-485 connecté à l’ordinateur embarqué par une interface USB. Ces systèmes assurent la gestion de l’alimentation et la sécurité du véhicule. Une interface Ethernet est utilisée pour fournir la connexion du tether à l’ordinateur embarqué.
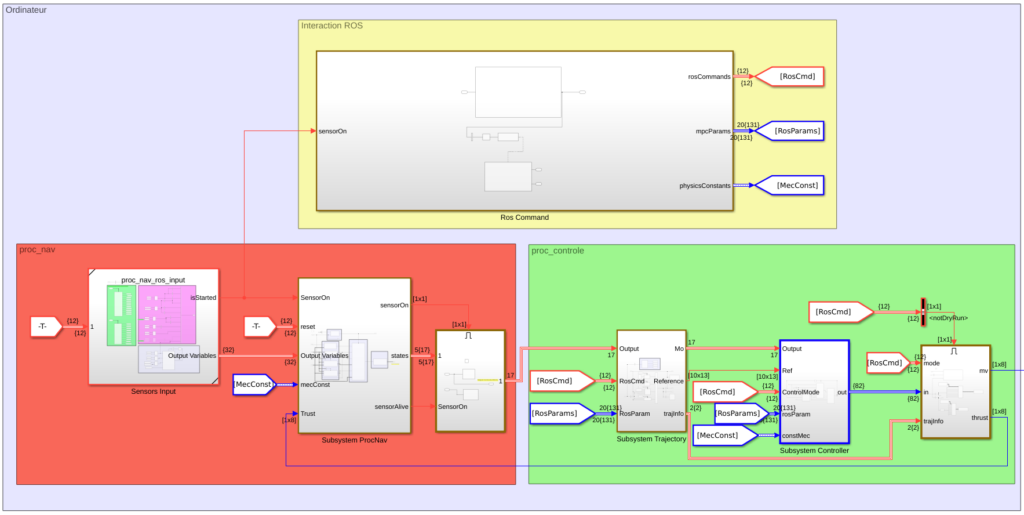
Le système de contrôle du LITE est une version adaptée de l’architecture de contrôle utilisée sur nos autres sous-marins, modifiée pour fonctionner sans DVL. Sur les véhicules précédents, le DVL fournissait des mesures de vitesse, utilisées ensuite pour estimer la position du sous-marin, tandis que l’IMU était principalement responsable de l’orientation et du suivi de la rotation.
Sans DVL, le LITE repose beaucoup plus sur une estimation basée sur l’IMU pour le suivi du mouvement et la navigation. Le système utilise deux IMU : le VN-100 et l’IMU intégrée à la ZED 2i, combinant plusieurs sources de capteurs afin d’améliorer la robustesse et la redondance. Bien que cette approche entraîne un suivi de position moins précis dans le temps qu’une solution basée sur un DVL, cette limitation est compensée par le système de vision embarqué, qui aide le sous-marin à maintenir sa position dans l’environnement et améliore la fiabilité de la navigation pendant les missions.
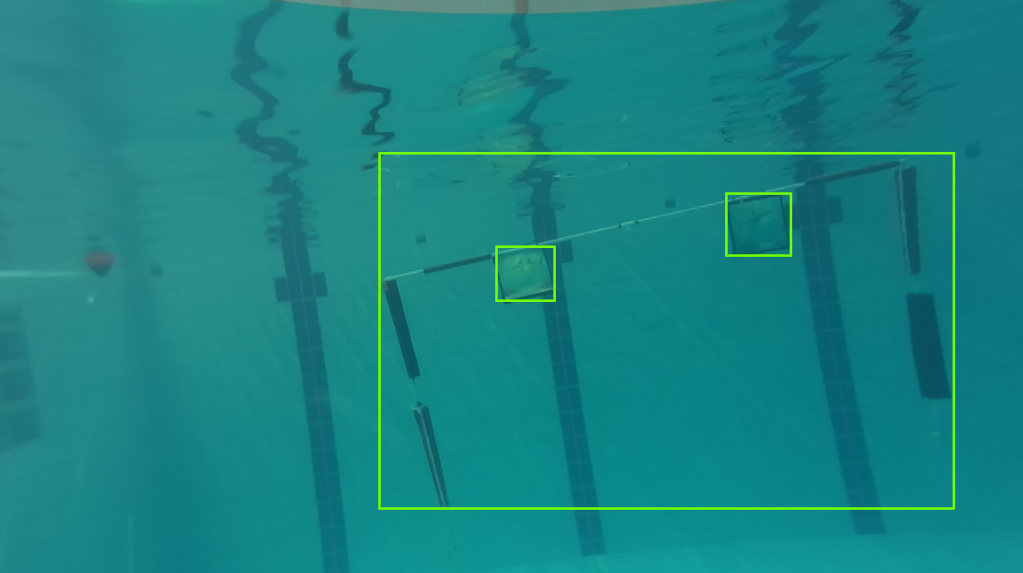
Tous nos sous-marins utilisent un système d’IA entraîné pour reconnaître les obstacles et les éléments de mission présents dans l’environnement de compétition. Les images capturées par les caméras embarquées sont collectées et annotées manuellement par les membres de l’équipe afin d’entraîner des modèles de détection personnalisés, adaptés à notre propre matériel et à nos conditions d’utilisation.
Pendant les missions, l’IA s’exécute directement à bord du sous-marin sur un Jetson AGX Xavier, permettant un traitement d’image en temps réel et la reconnaissance d’objets. Cela permet aux véhicules de détecter, identifier et interagir de manière autonome avec les éléments du parcours de compétition pendant les opérations sous l’eau.
")

