
LITE was designed as the first vehicle of the new LITE series, with the goal of providing a secondary autonomous submarine capable of assisting AUV8.1 during missions. Its primary role is to handle simpler tasks, gather environmental and mission data, and transmit information to the main vehicle. To achieve a lighter and more compact design, LITE does not include a DVL, torpedo launcher, dropper, or robotic arm. The vehicle also operates using a single battery, further reducing weight and simplifying its architecture while maintaining effective autonomous capabilities.
Overview:

Dimensions
Length: 593 mm – Width: 661 mm – Height: 349 mm
Weight: 28.26 Kg – Volume: 0.0333 m3

Hull
Machined and welded aluminum hull ensuring a strong, lightweight, and watertight structure.

6 degrees of freedom
X – Y – Z
Roll – Pitch – Yaw

Battery
1 X LiPo 4S2P – 17000 mAh – 14.8-16.4V
Total runtime: ≈ 45mn

Motors
8 Blue Robotics T200 thrusters – High-performance brushless underwater thrusters

Computer
Jetson Xavier AGX (8-core NVIDIA 64-bit CPU +
512-core NVIDIA GPU + 32GB RAM)

Vision
Stereolabs ZED 2i – High quality stereo camera for depth perception, 3D mapping, and visual tracking

IMU
VectorNav VN-100 – Miniature, high-performance Inertial Measurement Unit (IMU)

Control
IMU-based state estimation and 6-DOF control using an EKF and MPC.

Software
Ubuntu 20.04 – ROS 2 Humble – YOLOv11
C++ – Python
Learn more
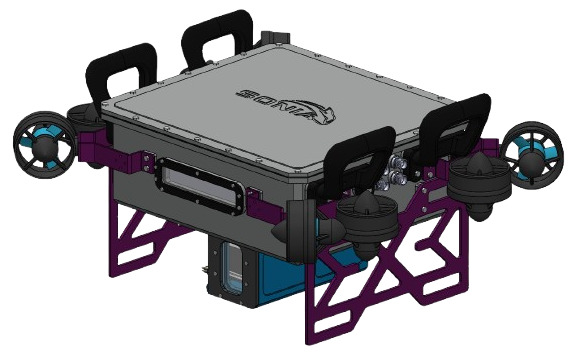
The hull of LITE was machined from five aluminum sections and welded into a watertight structure with guidance from our sponsor Paco Métal. The bottom and four side panels are permanently welded together, while the top cover is bolted in place to provide access to internal components. The positioning of the eight thrusters follows the same layout as our other submarines in order to preserve the 6 degrees of freedom control system.
The battery is mounted underneath the submarine, which led to the design of dedicated support legs and handles that allow the vehicle to be safely and easily flipped during maintenance and battery operations. The hull is powder-coated for increased corrosion resistance, while all other machined parts are anodized for improved durability in underwater environments.
The internal racking system was designed as a removable assembly that allows all electrical components to be accessed and serviced outside of the submarine. Once the cables are disconnected and the mounting screws removed, the entire rack can be extracted as a single unit for easier maintenance and integration work. The horizontal handles can be quickly removed by pulling retaining pins, improving accessibility when working inside the vehicle.
Most structural parts of the rack are 3D-printed to reduce weight and simplify customization. Nylon screws are also used inside the submarine to minimize the risk of short circuits in the event that a fastener becomes loose during operation.
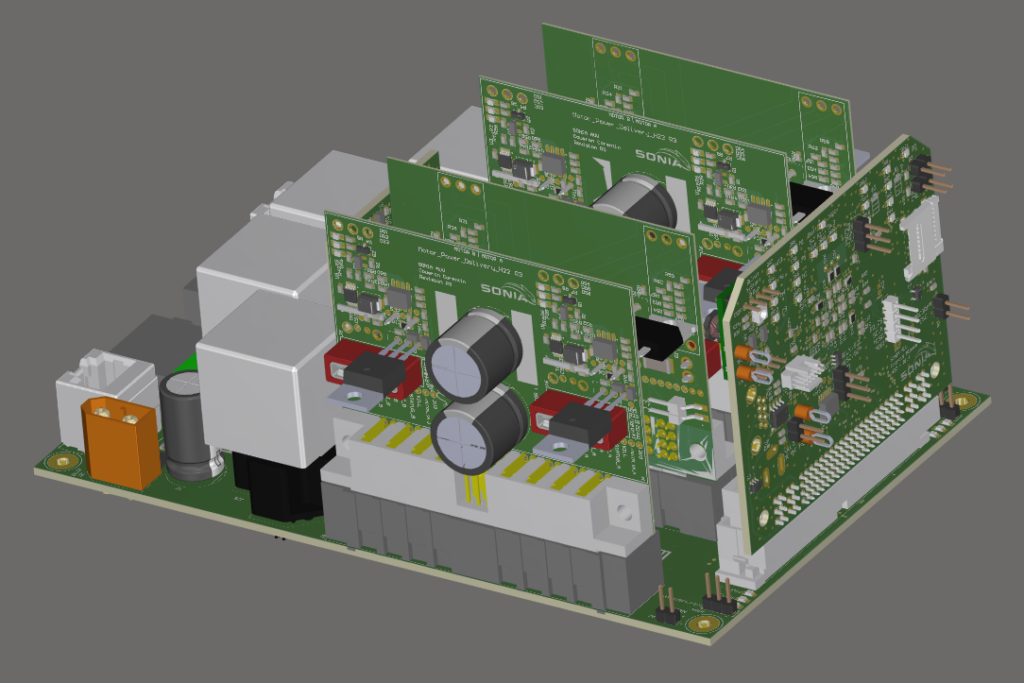

The new Power Management Unit (PMU) is connected directly to the batteries and is responsible for distributing power to all onboard systems and components. In addition to power management, the PMU also handles critical safety functions, including cutting power to the thrusters when the kill switch is activated.
This protection system is implemented as a true “hard kill,” meaning the shutdown does not rely on software or onboard computers. When the kill switch is triggered, power to the motors is physically disconnected, completely preventing any movement of the submarine and ensuring safe operation during handling or emergency situations.
The PMU was designed with a modular architecture to simplify maintenance and improve reliability. Four identical and interchangeable control boards are used, each responsible for powering and controlling two thrusters. In the event of a failure, a board can quickly be disconnected and replaced without modifying the rest of the system. The safety circuit is integrated into the same connector system, further simplifying installation and servicing while maintaining a robust and secure electrical design.
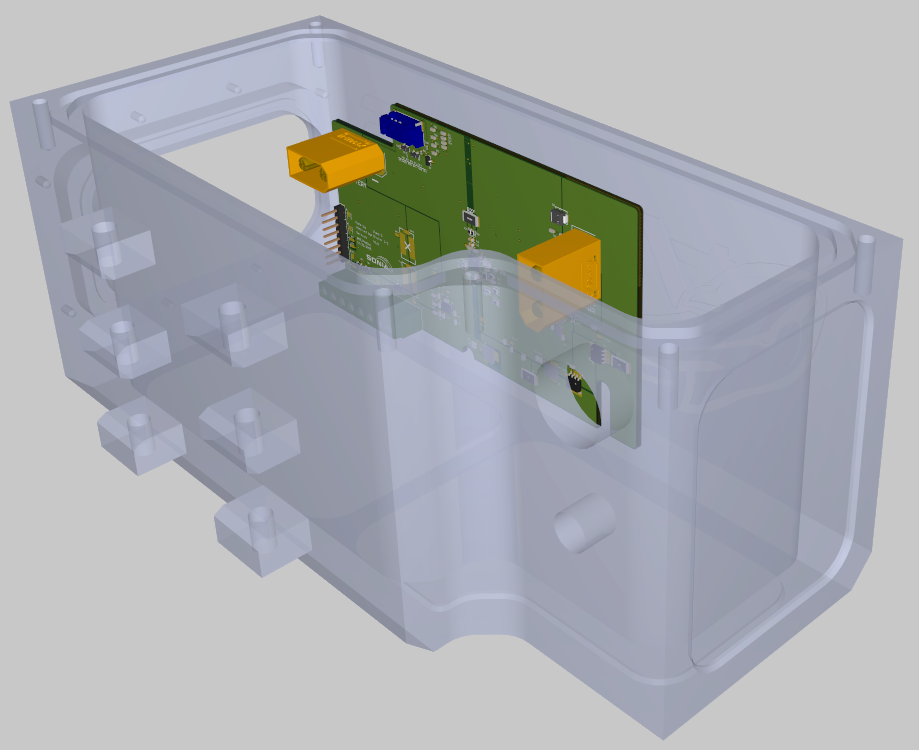
LITE also integrates the same Battery Management System (BMS) architecture used on AUV8.1, providing continuous monitoring and protection of the battery pack. The system tracks the voltage, current, and temperature of each cell to ensure safe operation, optimize performance, and extend battery lifespan.
Since LITE operates with a single battery, the electrical load on the pack is higher than on AUV8.1. The BMS therefore plays an even more important role in maintaining battery integrity and ensuring reliable operation during missions. As with AUV8.1, the system also allows the battery to be charged directly inside its casing, reducing handling time and minimizing the risk of leaks or water ingress.
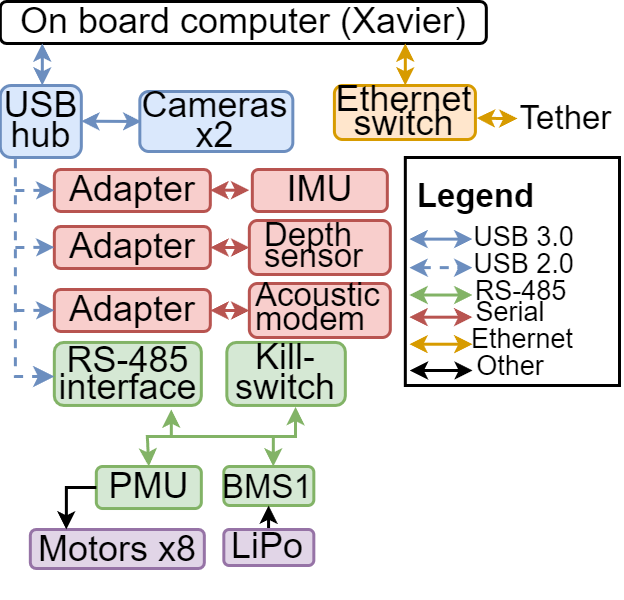
This diagram presents the internal architecture and communication network of the LITE. At the center of the system is the onboard computer, a Jetson AGX Xavier, which manages the submarine’s autonomy, sensors, and mission systems.
The vehicle uses multiple communication protocols to connect its subsystems. The cameras communicate directly through a USB hub, while serial-to-USB converters are used for the IMU, depth sensor, and acoustic modem. The embedded electrical systems, such as the PMU, a single BMS, and the kill switch, communicate over an RS-485 network connected to the computer through a USB interface. These systems handle power distribution and safety management for the vehicle. An Ethernet interface is used to provide the tether connection to the onboard computer.
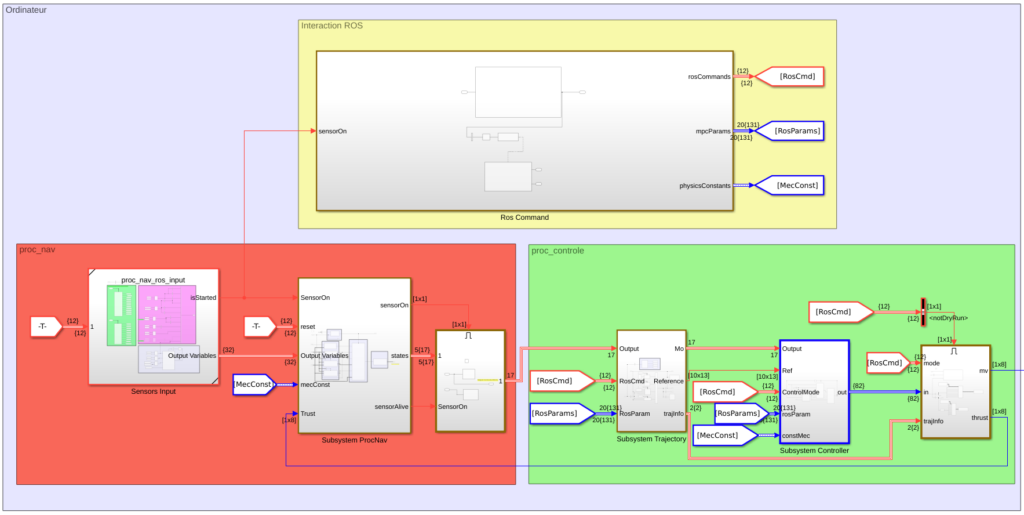
The control system of LITE is an adapted version of the control architecture used on our other submarines, modified to operate without a DVL. On previous vehicles, the DVL provided velocity measurements, which were then used to estimate the submarine’s position, while the IMU was mainly responsible for orientation and rotational tracking.
Without a DVL, LITE relies much more heavily on IMU-based estimation for motion tracking and navigation. The system uses two IMUs: the VN-100 and the IMU integrated within the ZED 2i, combining multiple sensor sources to improve robustness and redundancy. Although this approach results in less precise position tracking over time compared to a DVL-based solution, the limitation is compensated for by the onboard vision system, which helps the submarine maintain awareness of its environment and improves navigation reliability during missions.
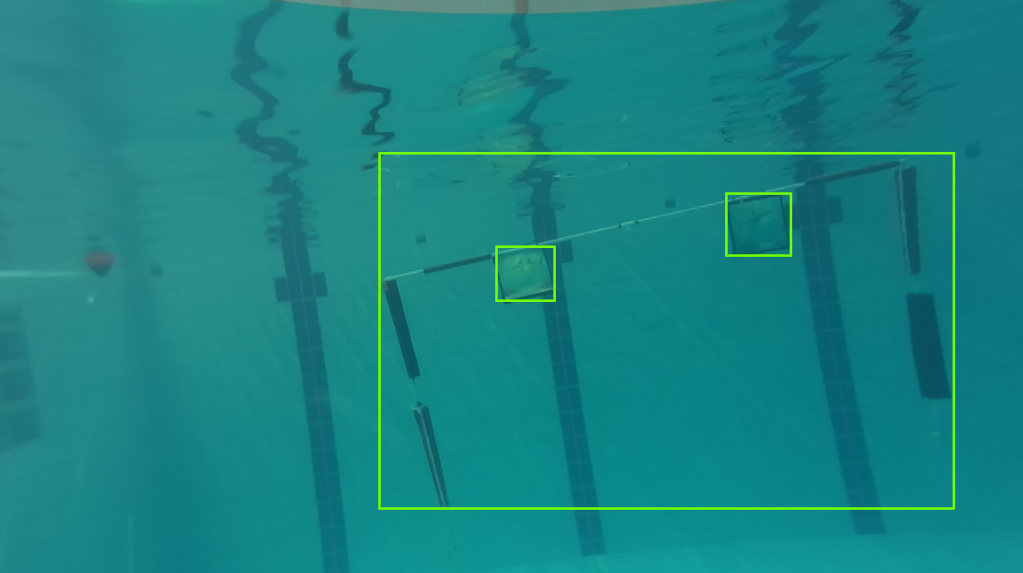
All of our submarines run an AI system trained to recognize the obstacles and mission elements used in the competition environment. Images captured by the onboard cameras are collected and manually labeled by team members in order to train custom detection models adapted to our own hardware and operating conditions.
During missions, the AI runs directly onboard the submarine on an Jetson AGX Xavier, allowing real-time image processing and object recognition. This enables the vehicles to autonomously detect, identify, and interact with elements of the competition course while operating underwater.
")

