
AUV8.1
The next iteration of AUV8


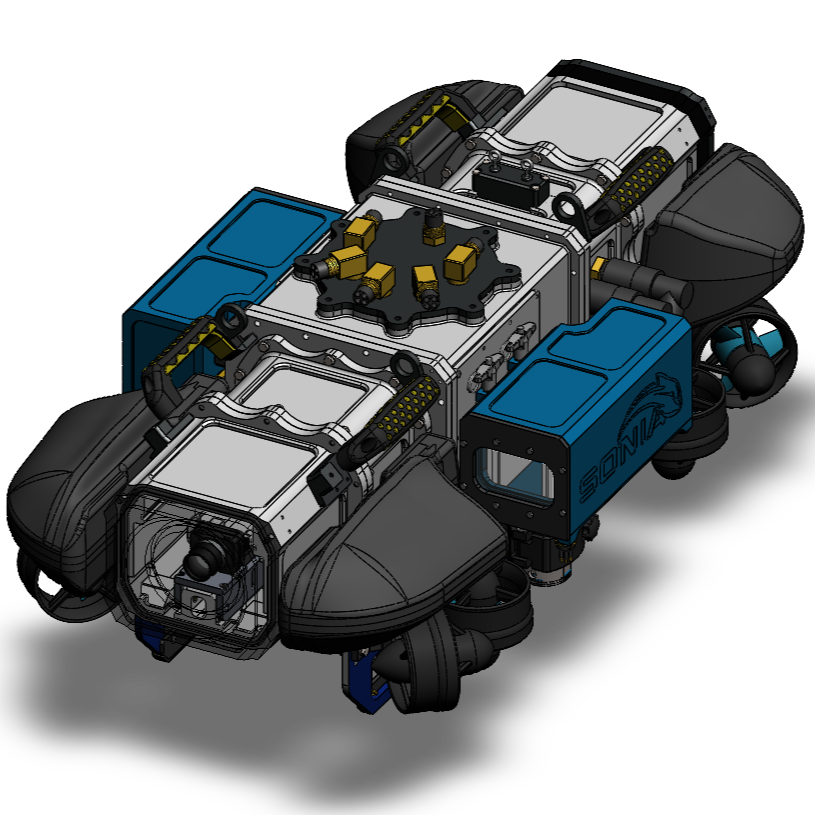
Goal: Built upon the original AUV8 platform, the next iteration introduced major improvements to its modular design in 2024. One of the main upgrades was the integration of external battery modules, eliminating the need to open the submarine during battery swaps. This redesign reduces the risk of leaks affecting critical components while significantly decreasing maintenance and preparation time between missions. The highly modular architecture of AUV8 made these improvements possible while preserving flexibility for future developments.
Overview:

Dimensions
Length: 871mm – Width: 453 mm – Height: 319 mm
Weight: 42.9 Kg – Volume: 0.0436 m3

Hull
Machined aluminum hull designed for strength, modularity, and reliable operation

6 degrees of freedom
X – Y – Z
Roll – Pitch – Yaw

Batteries
2 X LiPo 4S2P – 17000 mAh – 14.8-16.4V
Total runtime: ≈ 1.25h

Motors
8 Blue Robotics T200 thrusters – High-performance brushless underwater thrusters

Computer
Jetson Xavier AGX (8-core NVIDIA 64-bit CPU +
512-core NVIDIA GPU + 32GB RAM)

Vision
Stereolabs ZED Mini – Compact stereo camera for depth perception, 3D mapping, and visual tracking

IMU
VectorNav VN-100 – Miniature, high-performance Inertial Measurement Unit (IMU)

DVL
Teledyne Pathfinder – Doppler Velocity Log used for precise underwater navigation

Software
Ubuntu 20.04 – ROS 2 Humble – YOLOv11
C++ – Python
Learn more
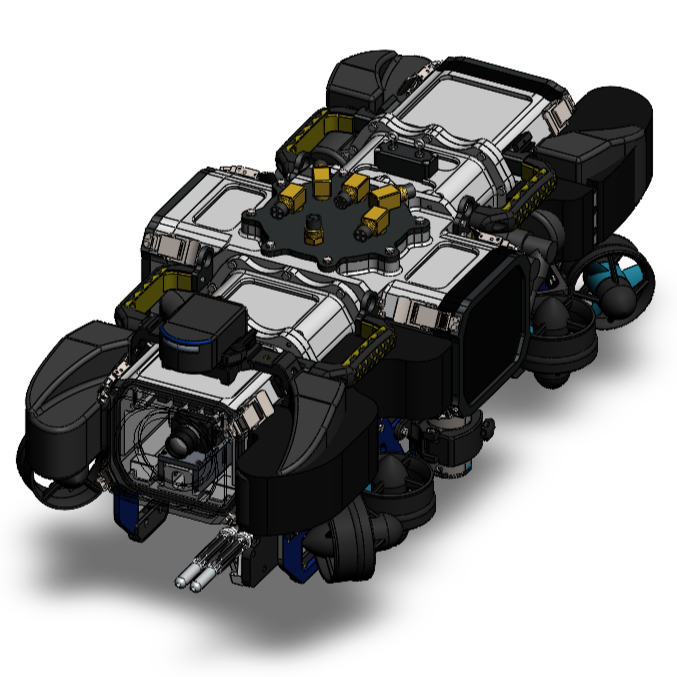
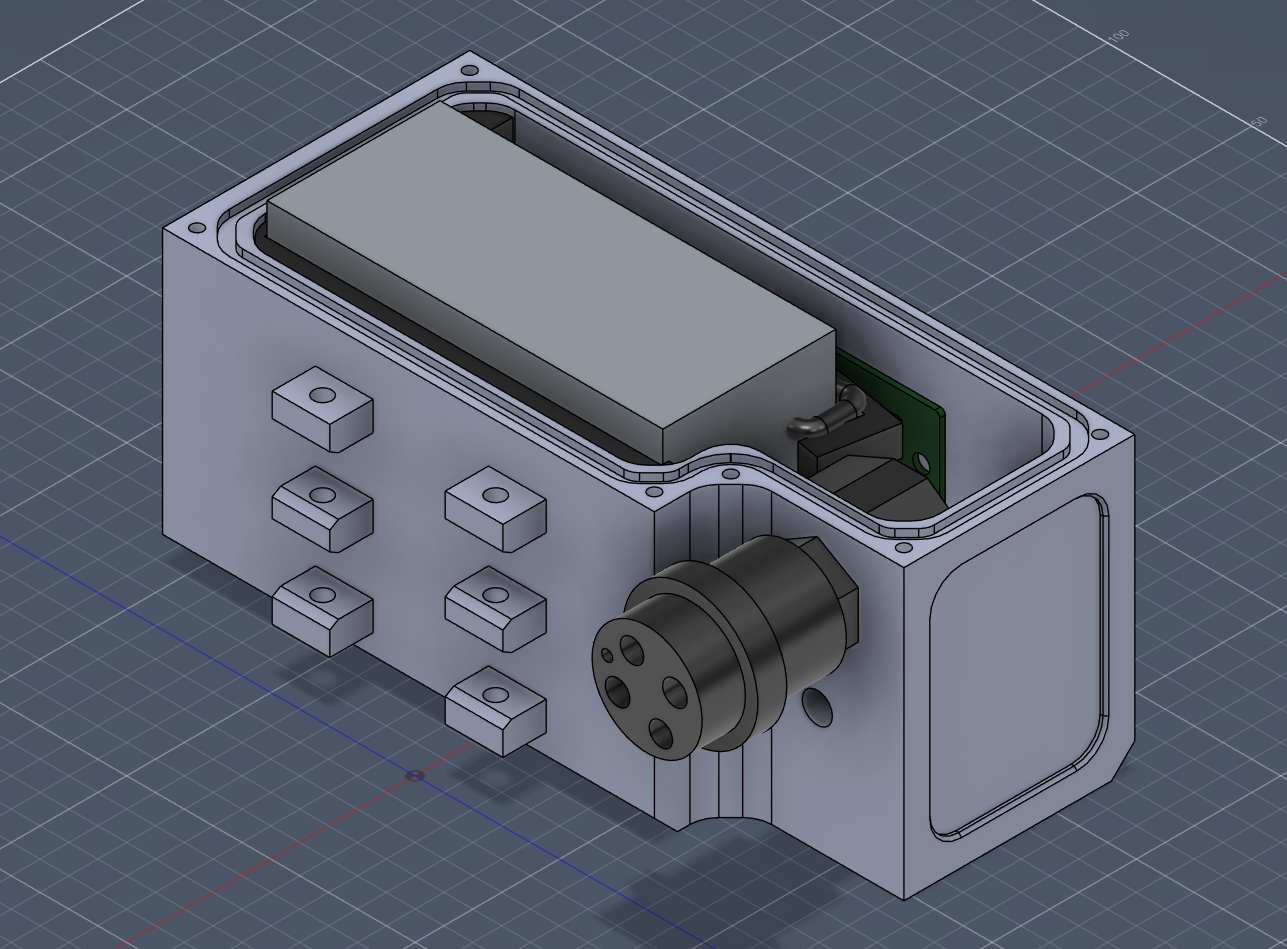
The mechanical aspect of the project focused on the machining and integration of a new central section and external battery casings for AUV8.1. The new center section provides mounting points for the batteries, while also increasing the internal volume and improving accessibility to electrical components through dedicated top and side access panels.
The support legs, flotation system, and torpedo launcher mounting point were also redesigned, while the remaining structural components from the original AUV8 were retained. The layout of the eight thrusters was kept similar to the original design in order to preserve the 6 degrees of freedom control system. All machined aluminum parts are powder-coated or anodized to improve durability and provide increased resistance against corrosion in underwater environments.
The internal racking system was redesigned to provide easier access to electrical components while securely holding them in place during operation. All parts are 3D-printed and assembled inside the submarine using reinforced clip-based mounts, resulting in a more secure and rigid installation than the previous design. The layout was optimized to improve space utilization, simplify access to electrical connections, and enhance cable routing throughout the vehicle. Airflow and ventilation were also considered in the design to improve internal circulation and overall system reliability.
The Battery Management System (BMS) is integrated into each battery casing and continuously ensures the safety and health of the battery packs. It monitors the voltage, current, and temperature of each cell to optimize performance and extend battery lifespan.
The system also enables easier charging without removing the batteries from their casings, significantly reducing handling time and minimizing the risk of leaks or water ingress.
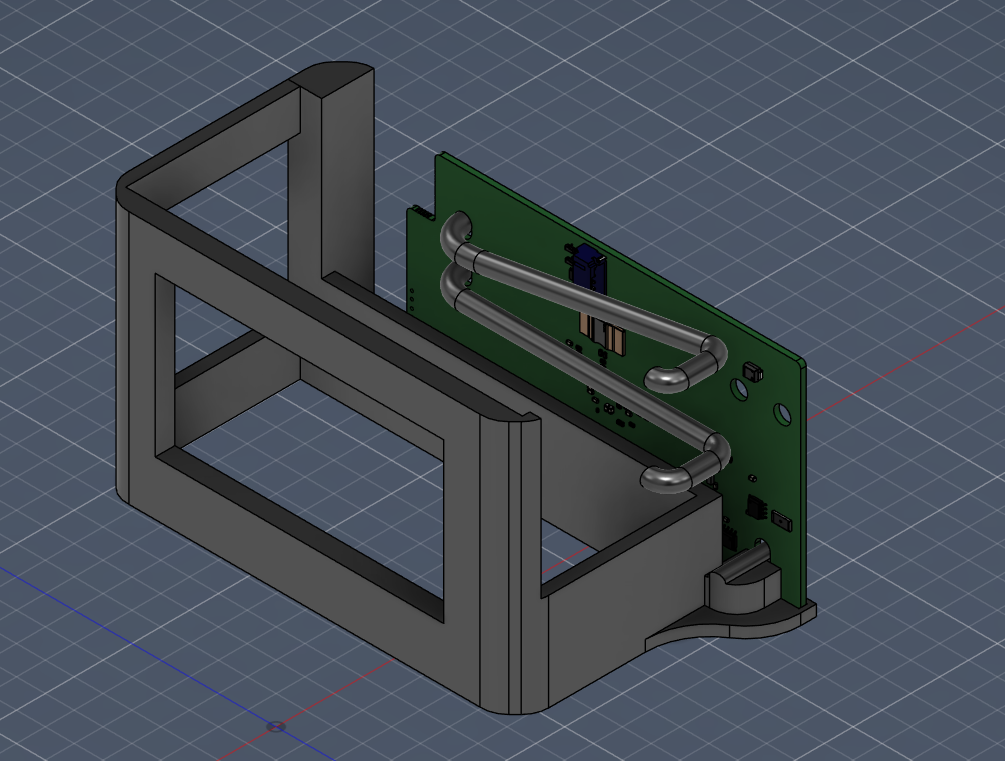
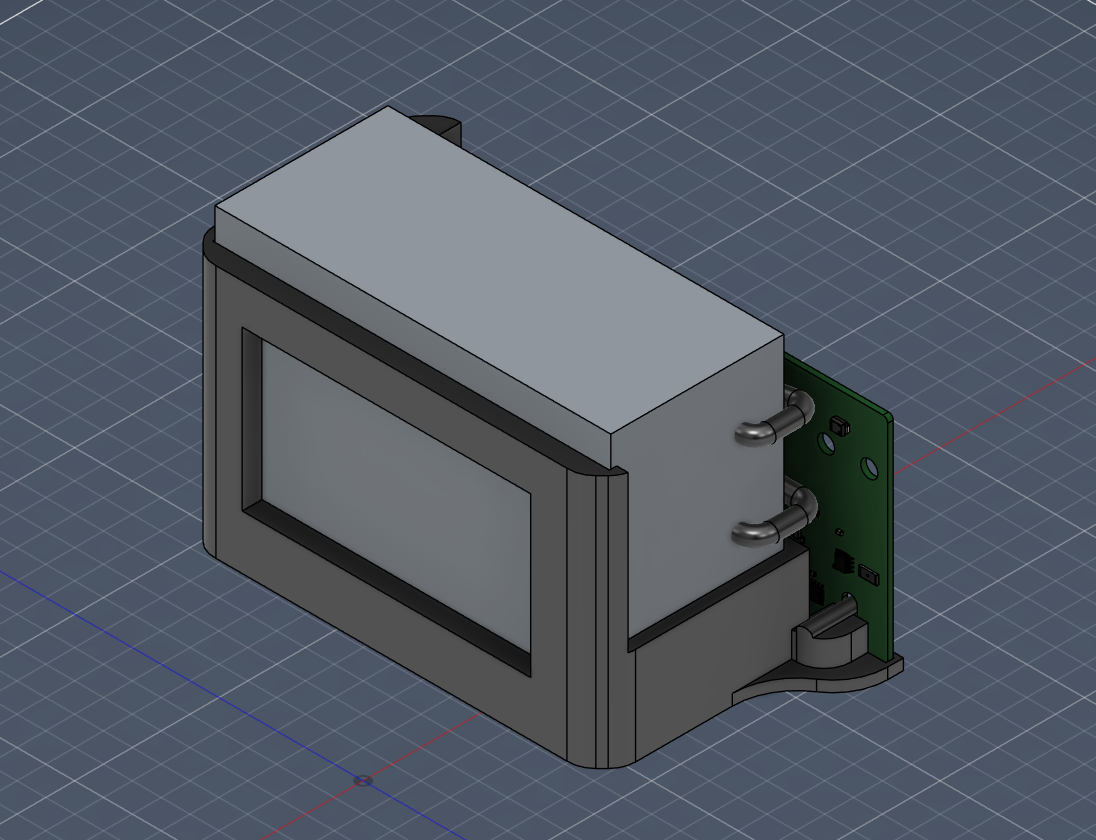

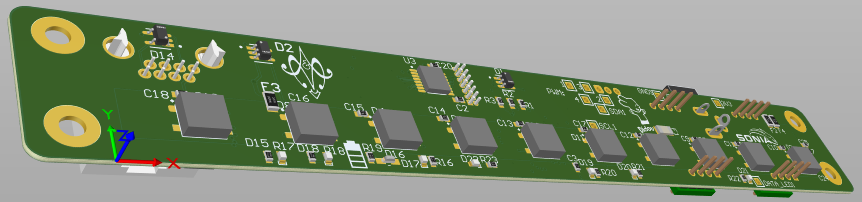
The LED communication system was integrated at the front of both submarines to enable inter-vehicle communication by controlling light colour and timing patterns. When the submarines are not communicating with each other, the LEDs are used to transmit real-time status information to operators at poolside.
This new system required the development of a dedicated PCB connected to the submarine’s RS485 network, allowing commands from the onboard computer to be reliably transmitted to the addressable LEDs.
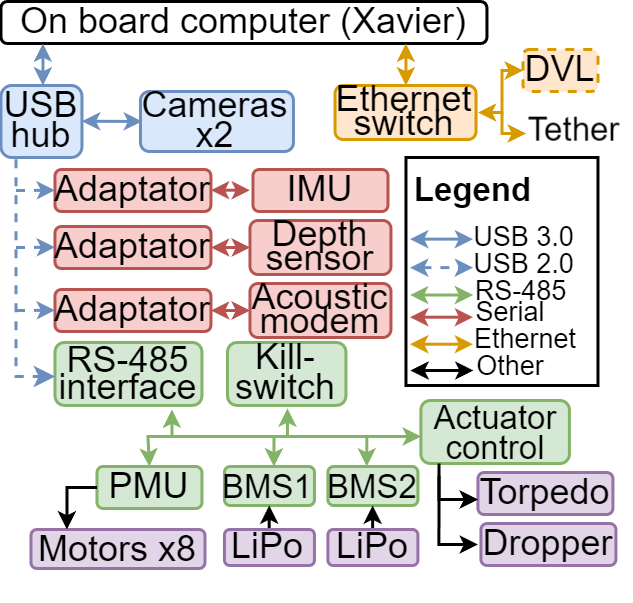
This diagram presents the internal architecture and communication network of AUV8.1. At the center of the system is the onboard computer, an Jetson AGX Xavier, which manages the submarine’s autonomy, sensors, and mission systems.
The vehicle uses multiple communication protocols to connect its subsystems. The cameras communicate directly through a USB hub, while serial-to-USB converters are used for the IMU, depth sensor, and acoustic modem. The embedded electrical systems, such as the PMU, BMSs, and kill switch, communicate over an RS-485 network connected to the computer through a USB interface. These systems then control the submarine’s hardware and power distribution. An Ethernet switch is also used to connect the DVL and tether interface to the onboard computer.
The integration of the ZED Mini stereoscopic camera provides the submarines with 3D perception and enables real-time mapping of the underwater environment. The captured imagery is also used to run the onboard AI system for obstacle detection and recognition, supporting autonomous decision-making during missions.
The ZED Mini was selected for its high-quality depth sensing capabilities as well as its compact form factor, as the larger ZED 2i could not fit within the submarine’s design constraints, making the ZED Mini the optimal choice for balancing performance and integration feasibility.

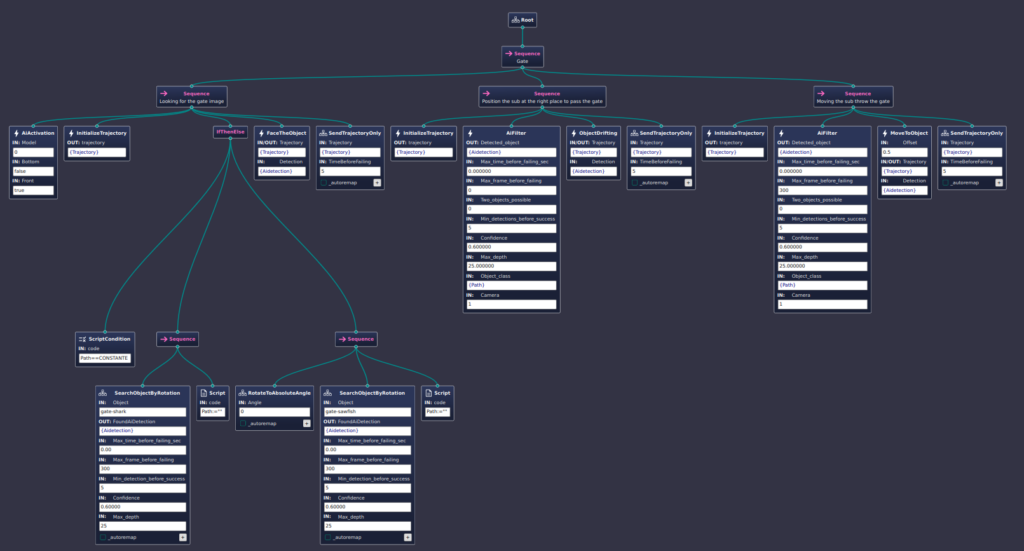
The new mission system is built using BehaviorTree.CPP and Groot2 to control the high-level behaviour of the submarine. AUV8.1 is the first vehicle in S.O.N.I.A.’s fleet to adopt this architecture.
This new approach offers improved reliability and greater flexibility compared to the previous system. Its modular structure makes it easier to customize mission logic, adapt behaviours, and integrate new autonomous tasks, while maintaining a clear and robust execution flow.








