
Meet the Electrical team!

The electrical team is responsible for developing, testing, and integrating most of the onboard electrical subsystems of the submarines. These systems include:
- Power distribution
- Motor control interfaces
- Kill-switch and mission-switch interfaces
- Actuator control systems
- Inter-component communication systems
- Inter-vehicle communication
A key aspect of the team’s work is the design of custom PCBs for the submarines. Most subsystems rely on dedicated electronic boards to operate properly, and the electrical team handles their design, assembly, and testing to ensure reliable operation in demanding underwater environments.
Electrical projects

{kind=link}
Inputs and Outputs
Accessories such as torpedo launchers, robotic arms, and droppers are integrated onto the submarines to interact with the competition environment. Ensuring the proper operation of these systems requires reliable electrical integration and control. The electrical team plays a key role in bridging the gap between the software and mechanical teams by connecting embedded control systems with the vehicle’s physical mechanisms and actuators.

{kind=link}
Inter-vehicle communication
Communication between the submarines is achieved using one of two techniques. The first relies on acoustic communication, where microphones and underwater speakers are used to transmit and receive information through sound. The second method uses optical communication, where LEDs and cameras are employed to encode and decode data through light signals. Through either of these systems, the submarines are able to exchange information in real time during operations without physical connections, enabling coordinated behaviours and improving the efficiency of multi-vehicle missions.

{kind=link}
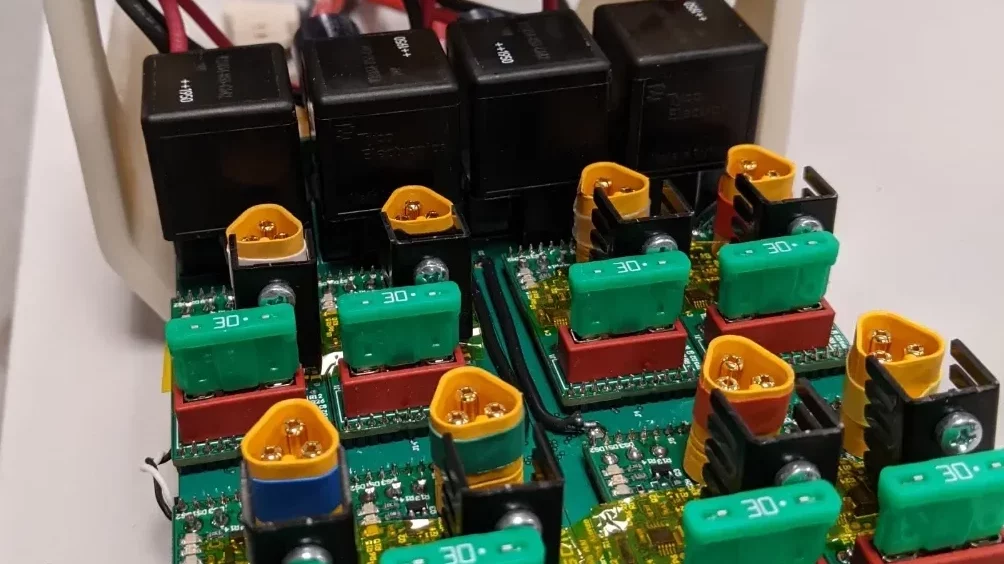
Power
Modern electronic systems often require precise voltage regulation to function properly. In S.O.N.I.A.’s submarines, the voltage from the lithium-polymer batteries is regulated and stabilized before being distributed to the various onboard electronic components. The power system is also responsible for managing the distribution of power to all eight motors. In addition, it continuously monitors voltage, current, and temperature to ensure safe operation, and is capable of cutting power to the motors in emergency stop situations.
{kind=link}
PCB Design
The electrical team designs and develops custom PCBs for the various systems onboard the submarines. The development process includes schematic design, PCB layout, manufacturing, soldering, testing, and debugging. These boards are designed using Altium Designer to ensure reliable and high-performance electronic integration throughout the vehicle.
{kind=link}
Embedded systems
All embedded systems onboard the submarines run FreeRTOS on STM32F4 microcontrollers. The firmware for these systems is fully developed, tested, and maintained by members of the electrical team to ensure reliable real-time operation in demanding underwater conditions.

{kind=link}
Hydrophones
In general, the hydrophones are used to calculate the time delay between the reception of a ping from a reference source and its detection by the three other hydrophones. Using these time and phase differences, the system can estimate the angle of arrival relative to the submarine’s X-axis, as well as the angle between the X–Y plane and the pinger. These two angles are then used to determine the vehicle’s position and improve underwater navigation accuracy. While only the heading angle is strictly required for the competition, using both angles increases the system’s reliability and makes it easier to validate and confirm the submarine’s movement in the water.