Before Competition
This competition aims to test the autonomy of submarines and the skills of student groups in terms of innovation by setting up various missions underwater. This competition allows, among other things, to measure the progress made during the year. S.O.N.I.A has to perform several complex tasks such as identifying obstacles, picking up and dropping objects, following acoustic signals, all without human intervention.
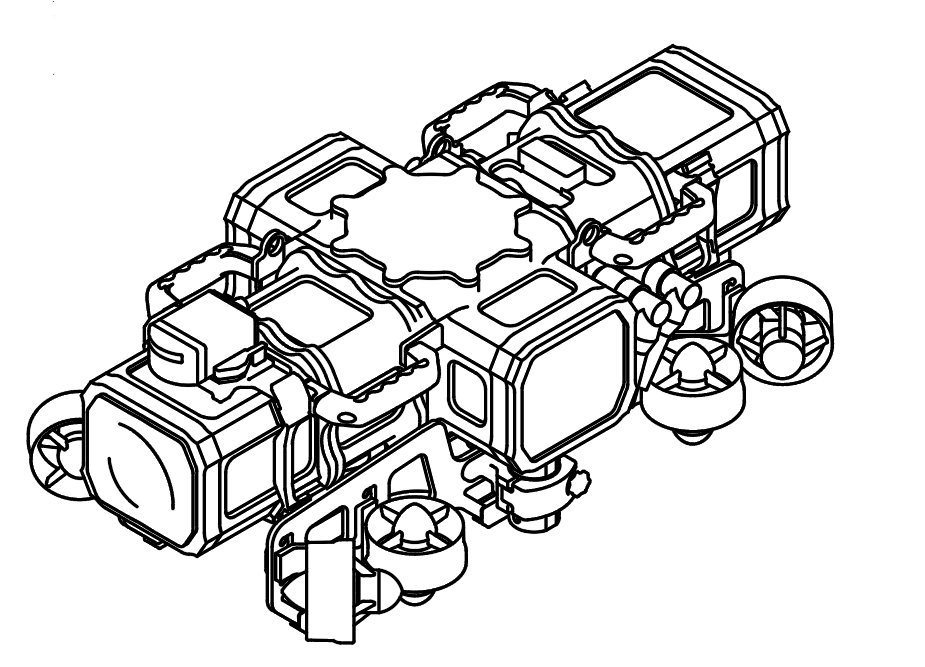
Our submarine is equipped with two cameras, a Doppler Velocity Log (DVL), an Inertial Measurement Unit (IMU), four hydrophones and a Mechanical Imaging Sonar. These sensors enable the vehicle to hear, see and measure its speed, acceleration and underwater position. Moreover, it can also accurately measure precise distance of objects ahead. In order to interact with its environment, the AUV is equipped with eight thrusters, an active grabbing system and a torpedo launcher.
Woollett Aquatics Center, Irvine
California, USA
Registration until Debruary 28
June 30 : Design Documentation Deadline
11-17 August 2025 : Robosub Competition OnSite
Competition Team Results
- 2024 – 10th position
- Special Award : Best in style
- Design Documentation – Assessment : 3rd position
- Design Documentation – Video : 6th position
- Design Documentation – TDR : 7th position
- 2023 – 13th position
- Design Documentation – TDR : 4th position
- Design Documentation – Assessment : 5th position
- Design Documentation – Website : 7th position
- 2022
- Design Documentation: 2nd position
- Autonomy Challenge: 5th position
- Data sharing acknowledgement (Thanks Camille Sauvain!)
- Intervehicle Communication
- 2021 ***online competition
- Skills Video – Hull Design: 1st position
- Skills Video – Sensor Optimization: 2nd position
- Website: 9th position
- Technical Design Report: 13th position
- 2020 – 20th position ***online competition
- 2019 – 17th position
- 2018 – 3rd position
- 2017 – 8th position
- 2016 – N/A
- 2015 – 17th position
- 2014 – 3rd position
- 2013 – 18th position
- 2012 – 3rd position
- 2011 – 1st position
- 2010 – 4th position
- 2009 – 10th position
- 2008 – 3rd position
- 2007 – 3rd position
- 2006 – 3rd position
- 2005 – 2nd position
- 2004 – 3rd position
- 2003 – 2nd position
- 2002 – 7th position
- 2001 – 11th position
- 2000 – 11th position








")






























")

")











