Overview
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat. Duis aute irure dolor in reprehenderit in voluptate velit esse cillum dolore eu fugiat nulla pariatur. Excepteur sint occaecat cupidatat non proident, sunt in culpa qui officia deserunt mollit anim id est laborum.
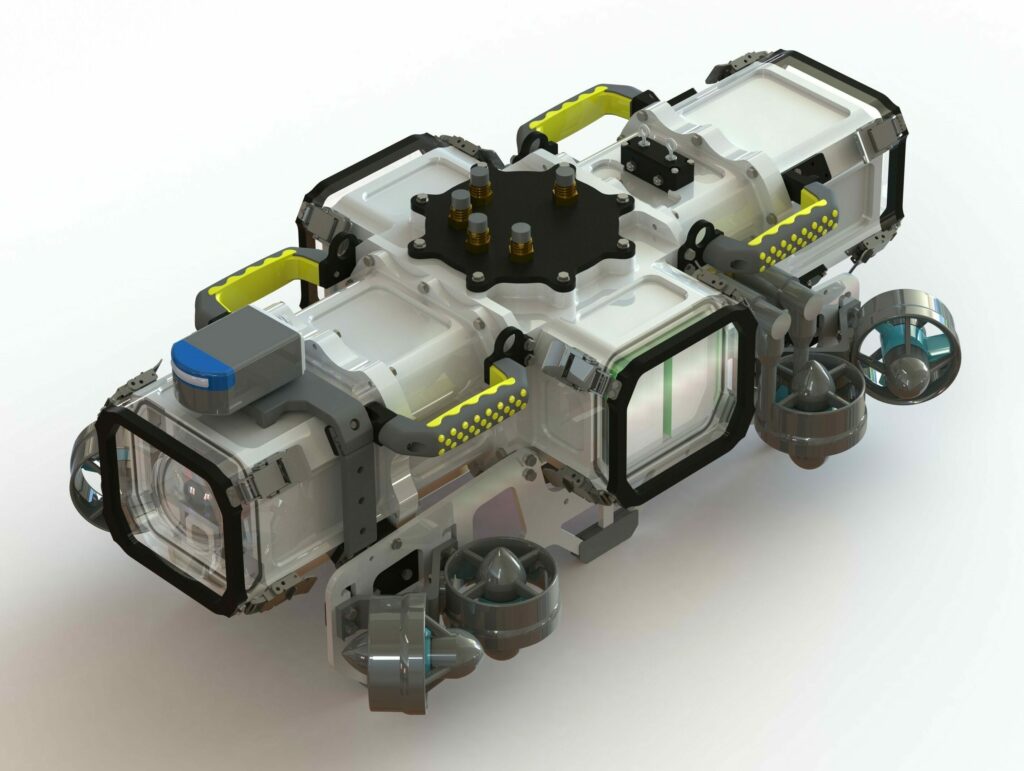
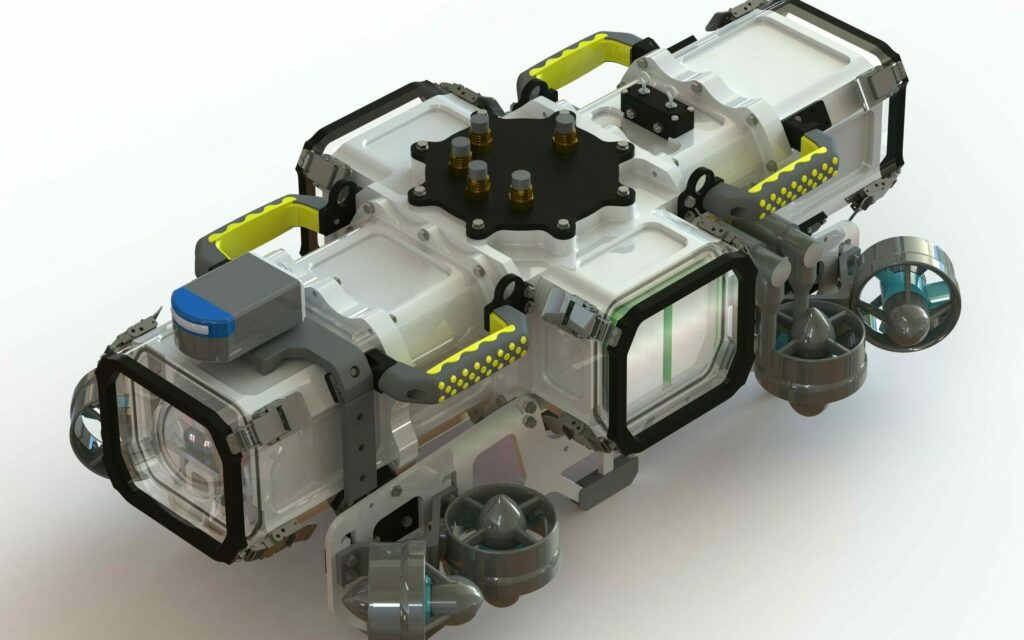
Mechanical
Aluminium cassing
Economical material and esayer manufacturing.
Better heat exchange with water and anodized for durability.
Modular
More and larger access points.
Clip system allows tool-free component installation/removal.
Power controle
Communication System:
Full-duplex RS-485 network connecting 14 devices.
Protocol custom-developed for optimized bandwidth and increase flexibility.
Power supply board:

Power supply boards
4 power supply boards
control system that monitors temperature, current, and voltage of the batteries and channels.
Power supply board
Two channels, each powering a motor, controlled by N-type MOSFET transistors.
Third channel: buck converter to supply 12V to the computer and DVL.
4S batteries (14.8V)
Better adapted for brushless motors.
Software
ROS Integration
First submarine to adopt ROS, replacing the previous Java + JAUS system.
Modular Node Architecture
- Blue nodes communicate with hardware (e.g., thrusters).
- Green nodes handle decision-making and send instructions to blue nodes.
Scalability & Maintainability
Changes in hardware only impact the corresponding blue node, keeping the rest of the system intact.
GALLERY