
Découvrez l'équipe logiciel !
L’équipe logicielle est responsable du développement de tous les systèmes informatiques embarqués à bord des AUV. Cela inclut aussi bien les pilotes de bas niveau qui collectent les données des capteurs que le système de mission qui gouverne le comportement global du sous-marin.
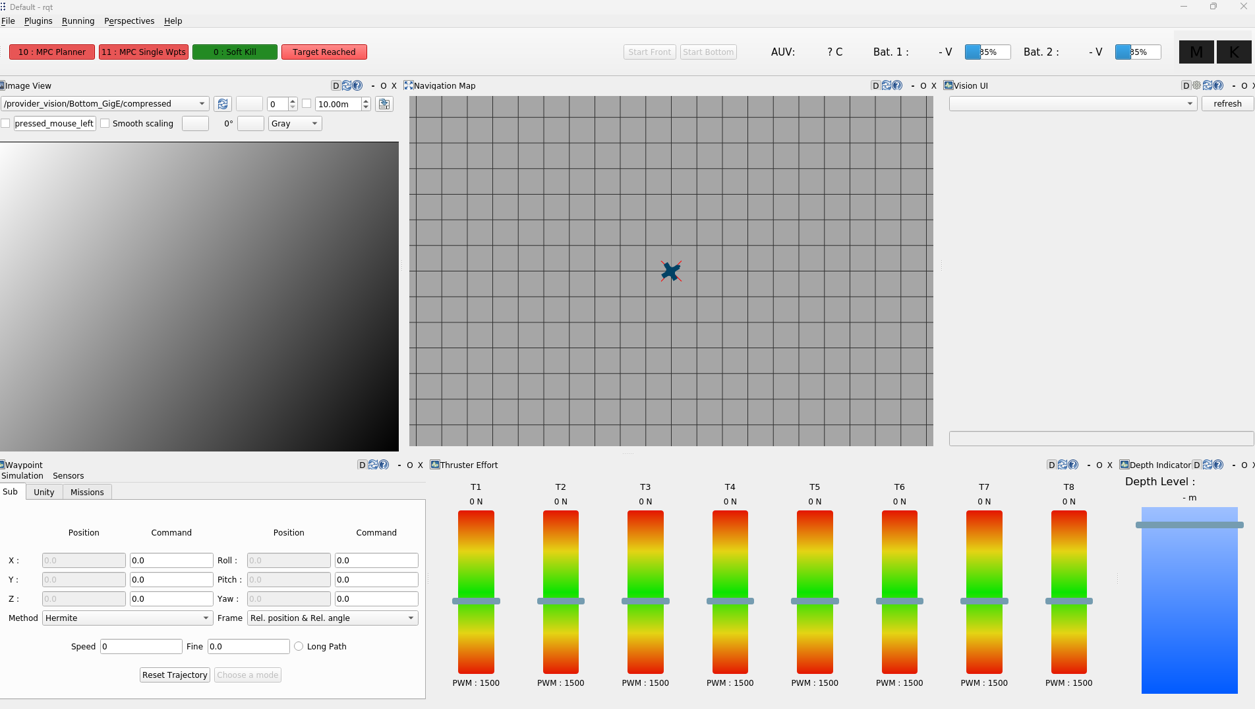
L’un de nos projets clés est un système d’intelligence artificielle entraîné à reconnaître et classifier les objets autour des sous-marins. Le contrôle du véhicule est assuré par une approche de type Model Predictive Control (MPC), qui utilise les données des capteurs en temps réel pour estimer la position du véhicule et calculer ses mouvements. Ensemble, ces systèmes sont essentiels pour garantir une navigation sous-marine fluide et fiable.
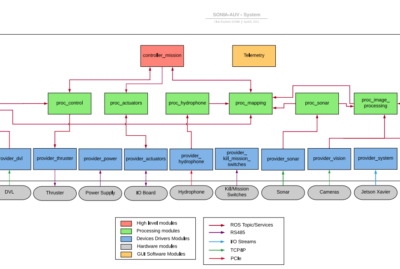
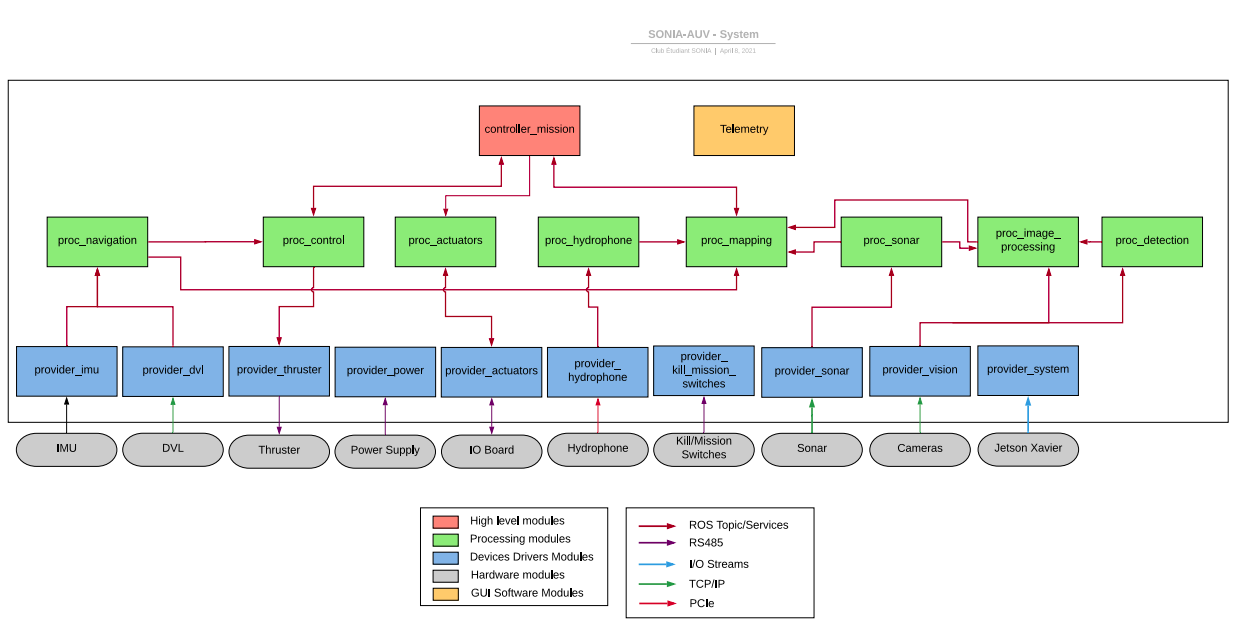
L’écosystème logiciel est construit autour de ROS 2, qui sert de cadre de communication. Son architecture modulaire permet de développer chaque système de manière indépendante tout en assurant une intégration fluide au sein d’un système unique et cohérent.
Projets logiciels
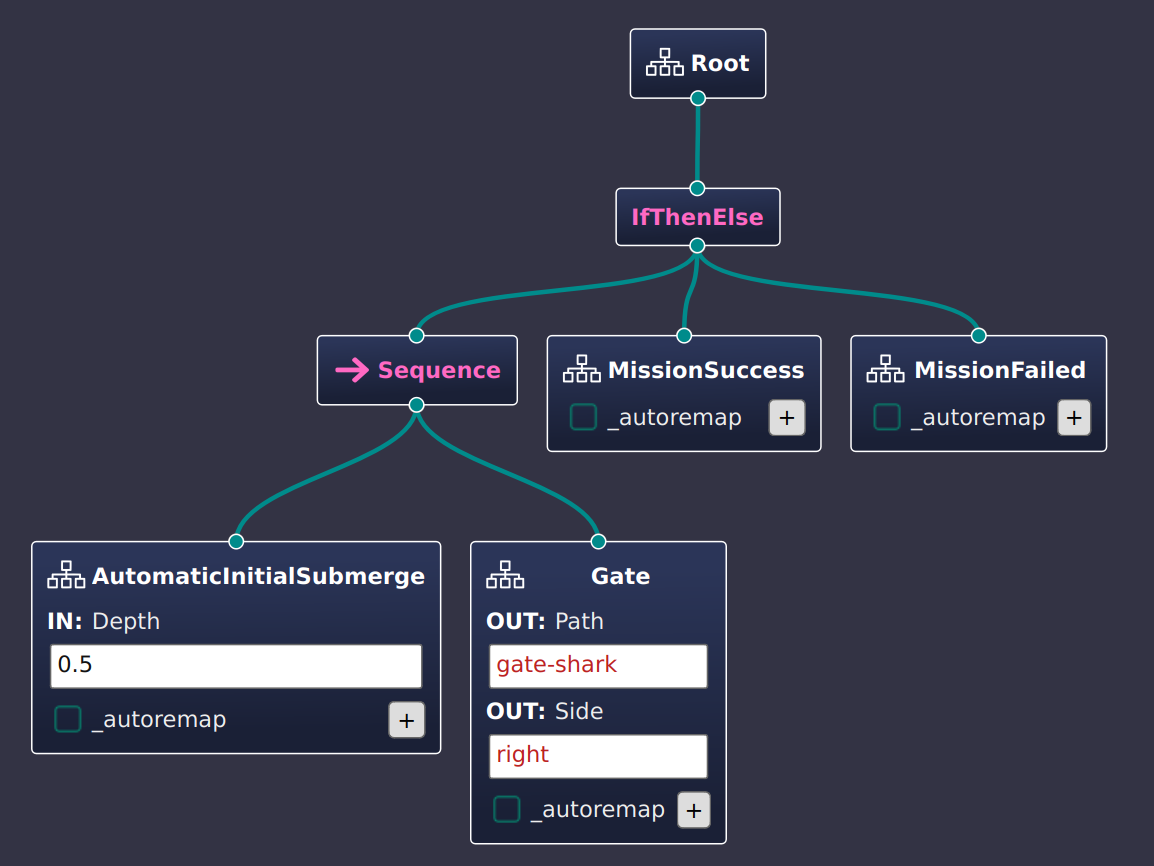
BehaviorTree (missions)
{kind=link}
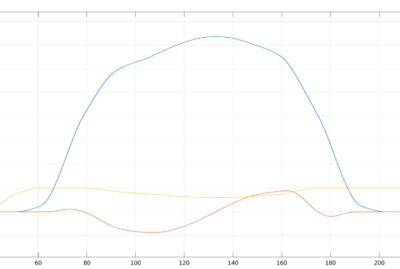
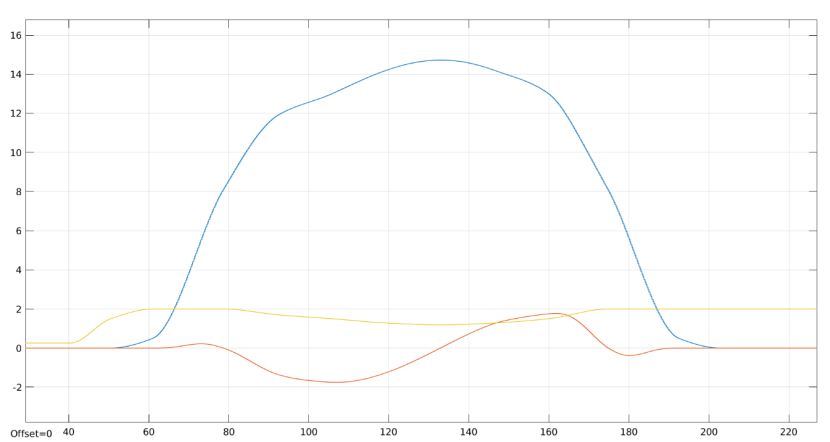
Contrôle
{kind=link}
Providers et Procs
{kind=link}
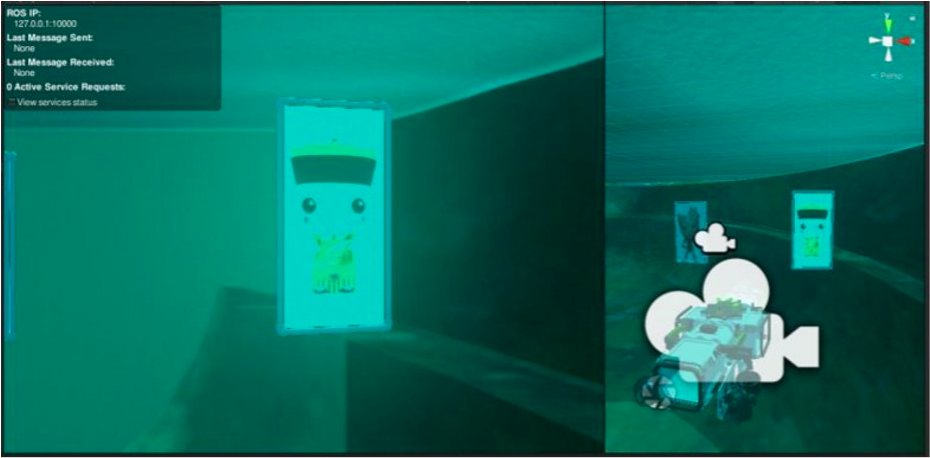
Simulation
Télémétrie
