Avant la compétition
Cette compétition vise à tester l'autonomie des sous-marins et les compétences des groupes d'étudiants en matière d'innovation en mettant en place diverses missions sous-marines. Elle permet, entre autres, de mesurer les progrès réalisés au cours de l'année. S.O.N.I.A. doit réaliser plusieurs tâches complexes telles que l'identification d'obstacles, le ramassage et le largage d'objets, et la détection de signaux acoustiques, le tout sans intervention humaine.
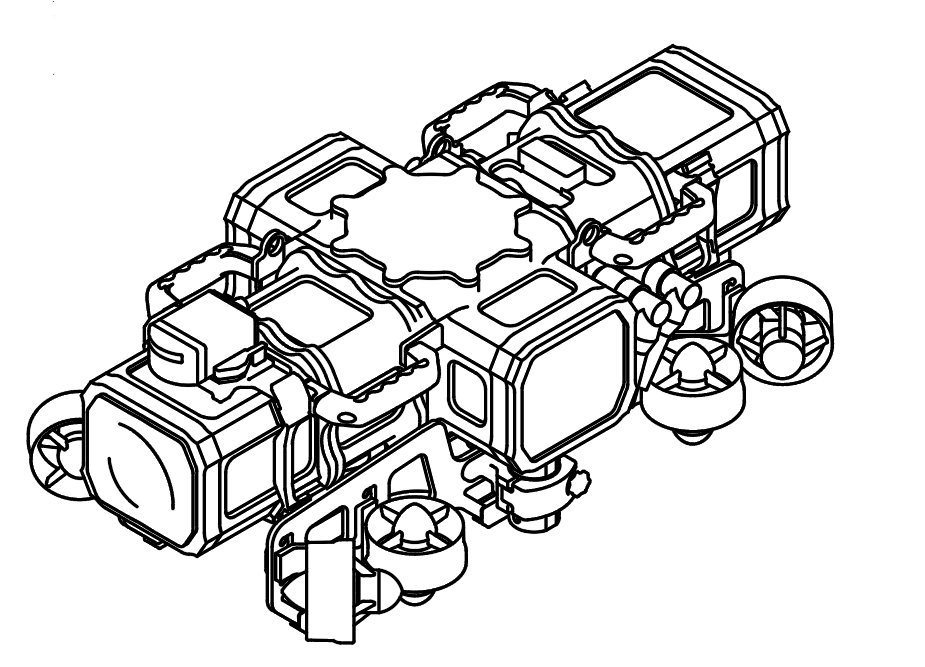
Notre sous-marin est équipé de deux caméras, d'un Doppler Velocity Log (DVL), d'une unité de mesure inertielle (IMU), de quatre hydrophones et d'un sonar d'imagerie mécanique. Ces capteurs permettent au véhicule d’entendre, de voir et de mesurer sa vitesse, son accélération et sa position sous l’eau. De plus, il peut également mesurer avec précision la distance précise des objets situés devant lui. Pour pouvoir interagir avec son environnement, l'AUV est équipé de huit propulseurs, d'un système de capture actif et d'un lance-torpilles.
Woollett Aquatics Center, Irvine
California, USA
Registration until Debruary 28
June 30 : Design Documentation Deadline
11-17 August 2025 : Robosub Competition OnSite
Résultats d'équipe de la compétition
- 2024 – 10th position
- Special Award : Best in style
- Design Documentation – Assessment : 3rd position
- Design Documentation – Video : 6th position
- Design Documentation – TDR : 7th position
- 2023 - 13e position
- Documentation de conception - TDR : 4e position
- Documentation de conception - Évaluations : 5e position
- Documentation de conception - Site Web : 7e position
- 2022
- Rapport technique: 2e place
- Défi autonome: 5e place
- Data sharing acknowledgement (Thanks Camille Sauvain!)
- Communication entre sous-marins
- 2021 ***online competition
- Vidéo - Conception de la coque: 1ere place
- Vidéo - Optimisation des capteurs: 2e place
- Site web: 9e place
- Rapport technique: 13e place
- 2020 – 20th position ***online competition
- 2019 - 17e place
- 2018 – 3rd position
- 2017 - 8e place
- 2016 - N.D.
- 2015 - 17e place
- 2014 - 3e place
- 2013 - 18e place
- 2012 - 3e place
- 2011 - 1ere place
- 2010 - 4e place
- 2009 - 10e place
- 2008 - 3e place
- 2007 - 3e place
- 2006 - 3e place
- 2005 - 2e place
- 2004 - 3e place
- 2003 - 2e place
- 2002 - 7e place
- 2001 - 11e place
- 2000 - 11e place



")



")















")





























