

Découvrez l'équipe électrique, responsable du développement, des tests et du déploiement de la plupart des sous-systèmes électriques à bord des sous-marins. Parmi ces sous-systèmes, on trouve :
- La distribution de puissance;
- L'interface de contrôle des moteurs;
- L'interface de la kill-switch et de la mission-switch;
- Le système de contrôle des actionneurs;
- Le système de communication inter-composants;
- Le système de sonar passif.
Ces sous-systèmes ont été mis en place à l'aide de PCB personnalisés avec du code embarqué, tous deux développés par des membres de l'équipe.
Un aspect important de notre équipe est la conception du faisceau de câbles pour les sous-marins. En effet, l’espace à l’intérieur du sous-marin est limité et créer un harnais optimal pour permettre des réparations rapides tout en laissant suffisamment d’espace pour les améliorations futures est toujours un grand défi !
Projets électriques

{kind=link}
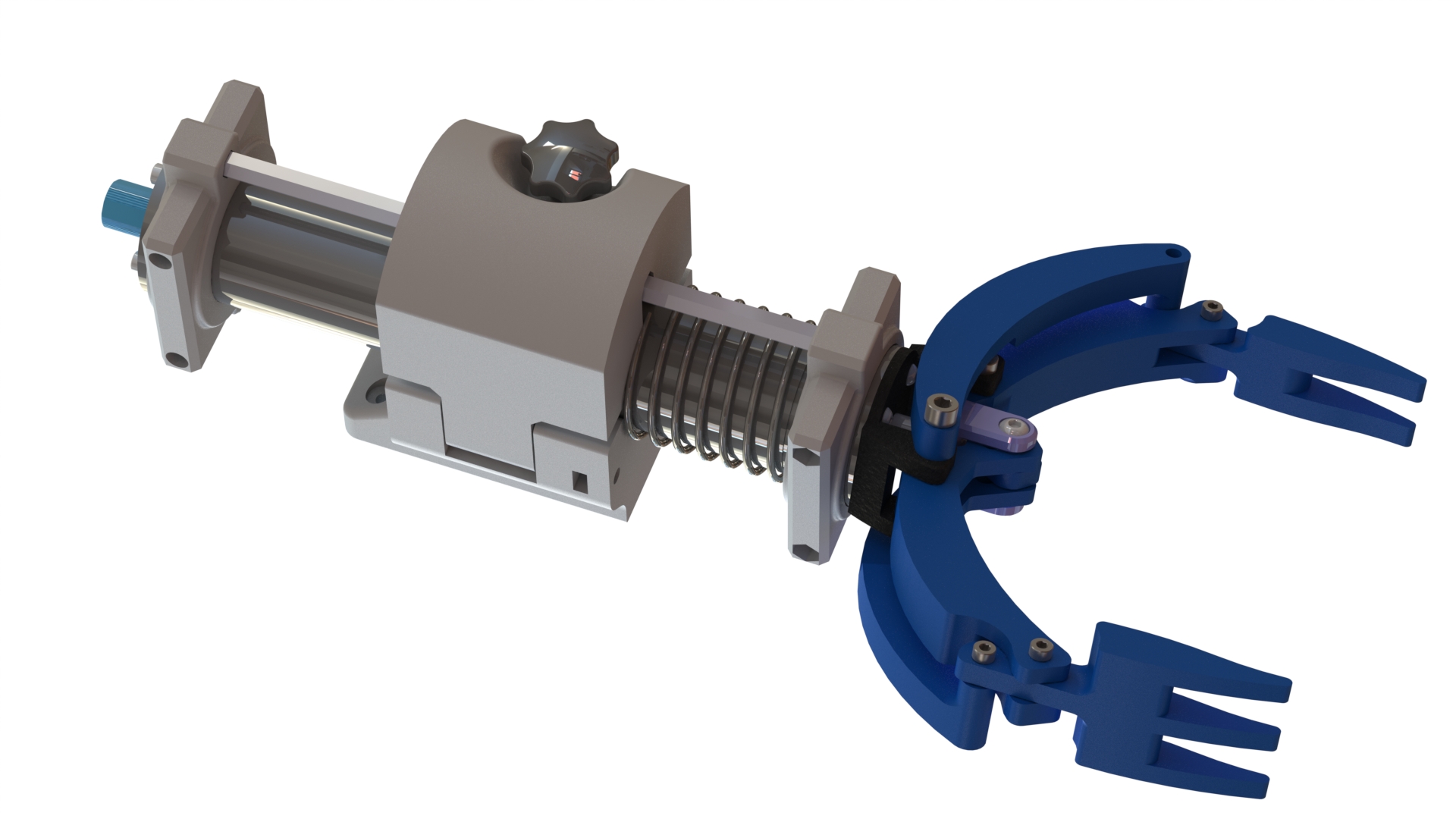
Entrées et Sorties
Des accessoires tels que des lance torpilles, un bras robotique et des «droppers» son positionnés sur le sous-marin. Pour assurer le bon fonctionnement de ces derniers, un bon fonctionnement du côté électrique est de mise.

{kind=link}
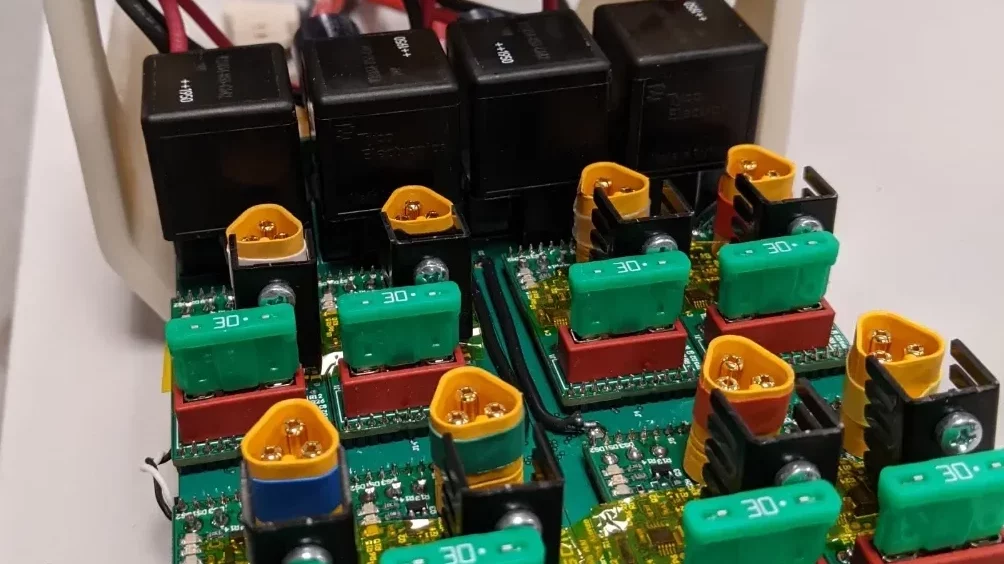
Alimentation
Les systèmes électroniques modernes nécessitent souvent une régulation de tension pour fonctionner correctement. Dans le cas des sous-marins de S.O.N.I.A., la tension des batteries lithium-polymère doit être réduite à un niveau adapté aux composants électroniques à faible puissance. Le système d'alimentation doit également gérer la distribution de puissance vers les huit moteurs.
{kind=link}
Conception de PCB
L'équipe électrique conçoit plusieurs PCB pour différents systèmes sur le sous-marin. Ils passent par les étapes de conception du schéma électrique, la conception du PCB, la commande, la soudure ainsi que les tests. (Outils : Altium)
{kind=link}
Embedded systems
Tous les systèmes embarqués du sous-marin utilisent le système d'exploitation Mbed OS sur des microcontrôleurs STM32F4. Les programmes de ces microcontrôleurs sont développés et testés par les membres de l'équipe.

{kind=link}
Hydrophones
En général, les hydrophones permettent de calculer le délai entre la réception d'un ping de la référence aux 3 autres hydrophones. Avec la différence de phase, nous pouvons obtenir l'angle (cap) pour la référence X sur le sous-marin et l'angle entre le plan X et Y et le pinger. Ces 2 angles permettent de naviguer à 2 positions. Seul le cap serait nécessaire pour la compétition, mais le système est plus fiable avec les 2 angles et il est plus facile de confirmer le mouvement du sous-marin.