
Depuis 1999
Depuis les débuts de S.O.N.I.A., les enseignants et les étudiants de l’École de Technologie Supérieure travaillent ensemble pour construire des véhicules sous-marins autonomes. Nos sponsors nous aident à atteindre notre objectif principal : Innover dans notre domaine d'expertise tout en allant au-delà de ce que nous avons appris..

Entièrement Autonome
Indépendant de toute interaction humaine, notre prototype a la capacité de fonctionner grâce au système d’intelligence artificielle implémenté.

Créativité et innovation
Sans se conformer à la norme, nous nous sommes poussés à la limite de notre créativité et de notre capacité d'innovation pour concevoir notre prototype.

Ouvert au monde
SONIA est un programme éducatif; par conséquent, tout notre travail est open source pour tous sur Github.
Découvrez nos sous-marins
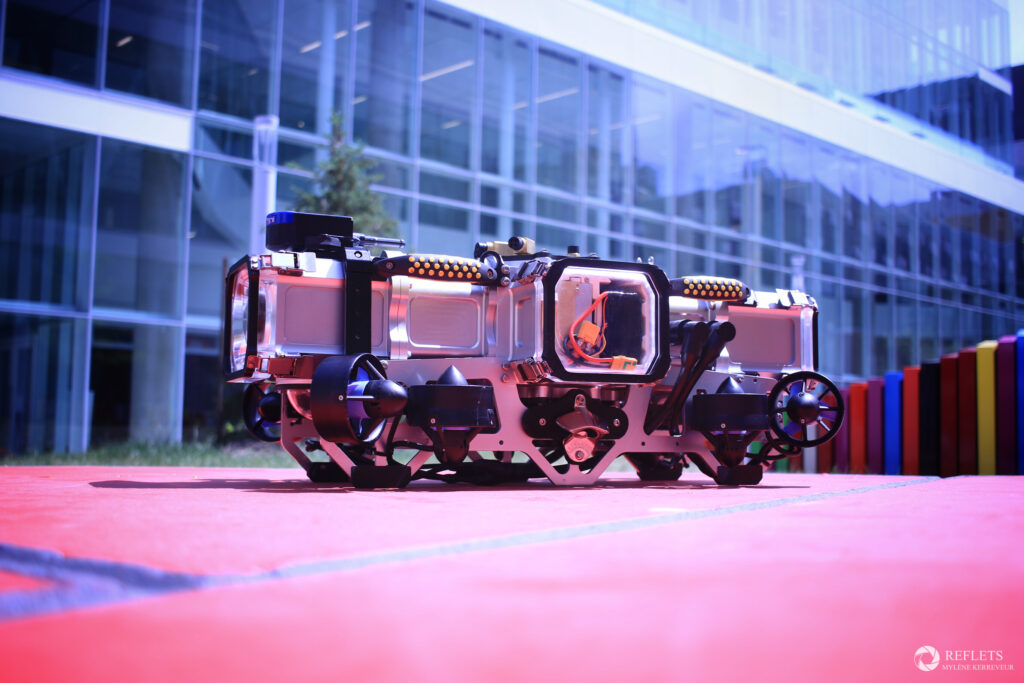
AUV 7
AUV8
Suivez nous !
Voulez-vous faire partie du projet?
Passons à l’étape suivante et travaillons ensemble!